Ракурсы головы человека: Освещение головы в разных ракурсах
30.08.2021 


 Разное
Разное
Рисование головы человека — Н. Н. Ростовцев | Изображение конструктивной схемы при различных положениях головы в пространстве
Изображение конструктивной схемы при различных положениях головы в пространстве — часть первая
Чтобы освоить метод построения изображения формы головы с помощью линейно-конструктивной схемы, необходимо запомнить ряд правил перспективного видоизменения этой схемы в зависимости от положения головы в пространстве. В свою очередь, чтобы правильно выразить конструктивную основу формы при любом положении головы в пространстве, рисовальщику надо запомнить ряд особенностей перспективного изображения конструктивной схемы.
При обучении рисованию с натуры большое значение имеет точка зрения, то есть место, откуда рисующий наблюдает натуру. Вид натуры сильно изменяется в зависимости от того, откуда смотрит рисующий.
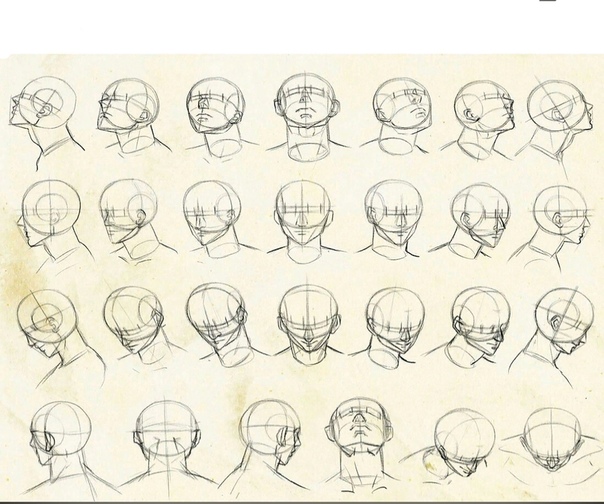
Рассмотрим основные положения (повороты) головы и разберем особенности построения их изображения.
- Голова в фас, фронтально. Положение головы на уровне наших глаз (рис. 38). Профильная линия при изображении головы в фас — прямая и делит голову на две равные и симметричные части.Поэтому, изображая симметричные формы головы — лоб, овал лица, нос, губы, подбородок, учащийся должен рисовать одновременно правую и левую части. Линии надбровных дуг, основания носа и подбородка, а также линии разреза глаз и рта будут прямыми и горизонтальными. Линия разреза глаз проходит через слезники и уголки (наружные края) глаз, а точнее — по шву, соединяющему скуловую и височную кости. Линия разреза рта проходит по границе верхней и нижней губ.
- Голова в фас, вид снизу (рис. 38). При построении изображения головы в ракурсе (в сокращении) конструктивные линии надбровных дуг, основания носа и подбородка должны быть округлыми и своими вершинами обращены вверх. Низ ушной раковины опустится ниже основания носа. Откроются (будут видны) нижние площадки надбровных дуг, нижние плоскости носа и подбородка.
 Линия разреза глаз опустится к горбине носа. Профильная линия по-прежнему остается прямой.
Линия разреза глаз опустится к горбине носа. Профильная линия по-прежнему остается прямой. - Голова в фас, вид сверху (рис. 38). При построении изображения головы в ракурсе (вид сверху) конструктивные линии надбровных дуг, основания носа, подбородка, разреза глаз и рта будут округлыми и обращены книзу. Низ ушной раковины будет выше основания носа. Нижние площадки носа, надбровья и подбородка скроются. Профильная линия по-прежнему остается прямой.
Рисунок №38 — Конструктивные схемы головы в фас
Построение изображения головы в трехчетвертном повороте (рис. 39).
- Голова на уровне наших глаз (рис. 39). При изображении головы в трехчетвертном повороте лицевая часть головы должна быть изображена в перспективе — одна половина в большем сокращении. Другая — в меньшем. Однако лицевую часть головы надо изображать одновременно — правую и левую половины — симметрично. Например, намечая абрис дальней от нас щеки, одновременно намечаем линией и форму ближней щеки, то есть повторяем в зеркальном отражении линию абриса дальней щеки.
- Голова выше уровня глаз рисующего (рис. 39). При таком положении головы конструктивные линии — линии надбровных дуг, разреза глаз основания носа, разреза рта и основания подбородка будут изображаться несколько изогнутыми и направленными вверх. Рисуя голову в таком положении, студенты часто нарушают законы перспективы и изображают ее в обратной перспективе (рис. 40, а). При данном положении головы глаз, который ближе к нам, всегда будет выше удаленного, а линии надбровных дуг, разреза глаз, основания носа и разреза рта по мере удаления от нас будут опускаться. Это очень легко доказать. Представим себе, что вместо головы перед нами находится простой ящик. На «лицевой» стороне наметим нашу схему головы, по законам перспективы это будет выглядеть, как на рисунке 40, б.
 Таким образом, ученик видит, что глаз, удаленный от нас ниже. Профильная линия будет изогнутой. Нижние площадки надбровья, носа и подбородка будут хорошо видны. Кончик носа будет выше линии основания носа.
Таким образом, ученик видит, что глаз, удаленный от нас ниже. Профильная линия будет изогнутой. Нижние площадки надбровья, носа и подбородка будут хорошо видны. Кончик носа будет выше линии основания носа. - Голова ниже уровня глаз рисовальщика (рис. 39). При построении изображения головы ниже уровня наших глаз конструктивные линии надбровных дуг, разреза глаз, основания носа, губ и подбородка будут округлой формы и обращены книзу. Кончик носа при таком положении будет ниже линии основания носа. Линия разреза глаз приблизится к линии надбровных дуг. Лицевая часть головы значительно сократится, а верхняя часть черепной коробки увеличится. Профильная линия остается немного изогнутой.
Рисунок №39 — Конструктивные схемы головы в трехчетвертном повороте
Рисунок №40 — Рисунок головы в обратной перспективе
Построение изображения схемы головы в профиль (рис. 41).
- Голова на уровне глаз рисующего.
 При рисовании головы в профиль неопытный рисовальщик вообще перестает думать о конструкции, объеме и ограничивается плоскостным изображением — силуэтом. Рисуя голову в профиль, студент добросовестно срисовывает абрис головы, не думая об объеме черепной коробки. Применение линейно-конструктивной схемы помогает избежать этого. Намечая лицевую часть головы линиями, рисующий должен помнить и о той части головы, которая не видна. Таким образом, он сможет рассматривать голову как объемную реальную форму.
При рисовании головы в профиль неопытный рисовальщик вообще перестает думать о конструкции, объеме и ограничивается плоскостным изображением — силуэтом. Рисуя голову в профиль, студент добросовестно срисовывает абрис головы, не думая об объеме черепной коробки. Применение линейно-конструктивной схемы помогает избежать этого. Намечая лицевую часть головы линиями, рисующий должен помнить и о той части головы, которая не видна. Таким образом, он сможет рассматривать голову как объемную реальную форму. - Голова выше уровня наших глаз. Изображение в профиль головы, которая находится выше уровня наших глаз, довольно простое. При таком положении головы рисовальщику легче уловить конструктивные особенности головы, а также перспективные сокращения. Следя за линией надбровных дуг, ученик легко сможет заметить, что глаз, обращенный к нему, будет выше невидимого. То же оказывается и при изображении ноздрей, уголков губ, челюстной кости. В рисунке надо подчеркнуть нижние площадки надбровья, носа, подбородка.
- Голова ниже уровня наших глаз. В этом положении конструктивные линии надбровных дуг, основания носа, разреза рта будут обращены книзу.
Рисунок №41 — Конструктивные схемы головы в профиль
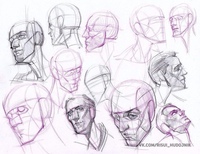
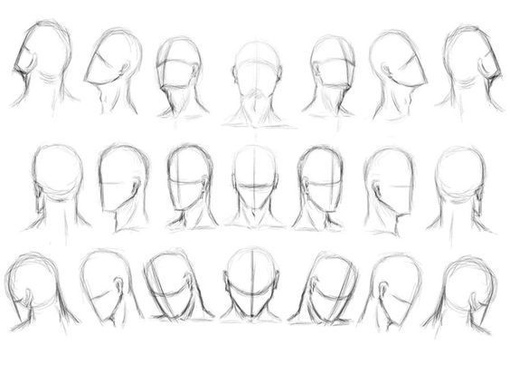
Чтобы учащийся почувствовал, насколько схема помогает построению изображения формы головы, необходимо следующее: во-первых, чаще менять положение натуры в пространстве и, во-вторых, чаще менять условия освещения. Тогда рисовальщик начнет понимать, что эффект рисунка зависит не от тушевки (светотени), а от правильного построения формы головы, от правильного выражения ее конструктивных особенностей. Пример подобных упражнений показан на рисунках 42, 43, 44. Подобные упражнения направлены на то, чтобы укрепить знания и навыки в построении формы головы в любом перспективном положении, чтобы молодой художник научился правильно понимать и изображать взаимосвязь частей и целого при построении изображения головы человека.
Рисунок №42 — Учебный рисунок
Рисунок №43 — Учебный рисунок
Рисунок №44 — Учебный рисунок
К началу поступления в художественное учебное заведение молодые художники уже имеют определенную подготовку в изображении головы человека.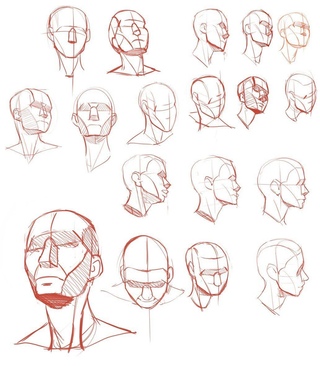 Однако этих знаний и навыков оказывается недостаточно, чтобы выполнить рисунок на должном профессиональном уровне. Учащиеся обычно не выполняют упражнения, не стремятся хорошо усвоить положения академического рисунка, не штудируют отдельные моменты построения изображения.
Однако этих знаний и навыков оказывается недостаточно, чтобы выполнить рисунок на должном профессиональном уровне. Учащиеся обычно не выполняют упражнения, не стремятся хорошо усвоить положения академического рисунка, не штудируют отдельные моменты построения изображения.
В учебном рисунке сложные моменты построения изображения необходимо усваивать изолированно друг от друга, как это делают музыканты, штудируя тот или иной пассаж, или как спортсмены отрабатывают свои движения.
Конструкция головы человека и её основные пропорции | Презентация к уроку по изобразительному искусству (ИЗО, 6 класс) на тему:
Слайд 1
Конструкция головы человека и её основные пропорции Автор: Каяткина Ольга Владимировна МАОУ СОШ №84 г. Челябинск, Челябинская область Урок изобразительного искусства в 6 классеСлайд 2
Цель: Познакомить учащихся с закономерностями конструкции головы человека Задачи: развивать наблюдательность, воспитывать эстетический вкус; формировать умение находить красоту, гармонию, прекрасное во внутреннем и внешнем облике человека, активизировать познавательный интерес к окружающему миру и интерес к процессу обучения.![]() Оборудование: портретные эскизы людей разных возрастов, выполненные на классной доске зарисовки головы.
Оборудование: портретные эскизы людей разных возрастов, выполненные на классной доске зарисовки головы.
Слайд 3
Пропорции головы человека Пропорциями называются размерные соотношения элементов или частей формы между собой. В художественной практике существует известный метод определения пропорций, называемый визированием.
Слайд 4
Чтобы научиться рисовать портрет , следует изучить части лица.
Слайд 5
Голова в целом построена по принципу геометрических объемов и ее изображение состоит из комбинации усложненных геометрических тел. А. Дюрер Аналитический рисунок построения головы человека
Слайд 6
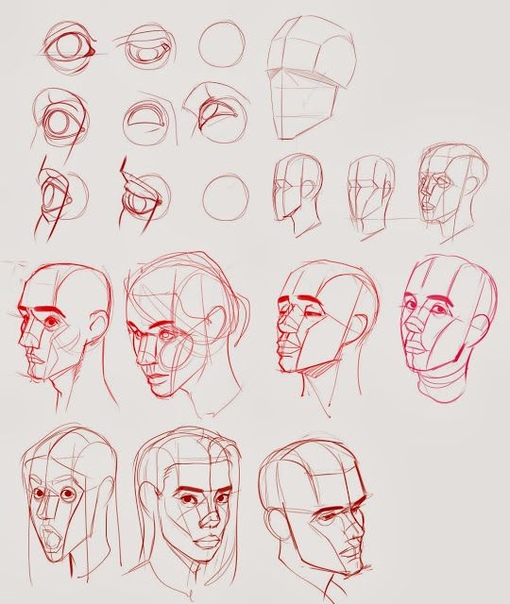
Как нарисовать глаза Глаза играют очень важную роль в сходстве портрета с натурой. Начать рисовать глаз можно с его обобщённой формы, глазное яблоко имеет шаровидную форму). Поэтому, приступая к прорисовке глаз, нужно наметить глазные впадины, при этом помня, что они расположены не очень близко к носу. Расстояние между глазами равно длине самого глаза .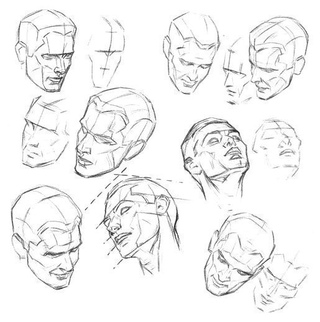 Далее, наметив зрачок, начинаем прорисовывать веки.
Далее, наметив зрачок, начинаем прорисовывать веки.
Слайд 7
Рисуем нос Рисуя нос, нужно сначала внимательно изучить его характерные особенности: носы бывают прямые (1), курносые (2) и с горбинкой (3).
Слайд 8
Носы бывают длинные, короткие, узкие и широкие. Основание носа равно ширине глаза. Намечая нос, нужно помнить, что середина лицевой линии носа проходит через середину его основания и кончика.
Слайд 9
Схема рисования носа
Слайд 10
Рисуем губы Прежде чем начать рисовать губы, нужно наметить среднюю линию рта (это линия, где верхняя губа соединяется с нижней), затем на этой линии определить длину и толщину губ (обычно нижняя губа более толстая, чем верхняя, но бывает, что они равны по толщине). Также нужно помнить, что рот находится ниже линии основания носа. Далее нужно начать обрисовывать очертания губ, стараясь передать их характерную форму (тонкие, толстые, средние , ровные по контуру или с изгибом на верхней губе).
Слайд 11
Рисуем уши Уши обычно расположены на уровне от бровей до основания носа. Для того чтобы правильно наметить уши, нужно вычертить воображаемую ось уха, которая проходит параллельно линии носа. Далее намечают общую форму уха и прорисовывают детали.
Для того чтобы правильно наметить уши, нужно вычертить воображаемую ось уха, которая проходит параллельно линии носа. Далее намечают общую форму уха и прорисовывают детали.
Слайд 12
Рисуем волосы Волосы красиво обрамляют голову и начинаются на середине расстояния от линии глаз до темени (верхней точки головы). Все причёски можно свести к наиболее типичным.
Слайд 14
Практическая работа первый способ выполнения рисунка Выполнить рисунок головы с различно соотнесёнными деталями лица (нос, губы, глаза, брови и так далее)
Слайд 15
второй способ выполнения рисунка
Слайд 17
Домашнее задание: дорисовать портрет
Как нарисовать голову человека карандашом поэтапно
Шаг 1Я не знаю более достоинства для художника, чем знание названий всех мышц и костей головы. Очень важно для художника знать расположение мышц и костей, где они прикрепляются и какую функцию выполняют.
Очень важно знать, что некоторые мышца прикреплены прямо к кости с обоих концов, в то время как другие прикреплены одним концом к кости, а другим – к другой мышце. Мышцы, которые обоими концами крепятся к кости, выполняют функцию двигателя кости. Остальные двигают другие мышцы и кожу.
Мышцы, которые обоими концами крепятся к кости, выполняют функцию двигателя кости. Остальные двигают другие мышцы и кожу.
Очень изумительными механическими функциями наделены мышцы глаз и рта. Они разделены на округлые мышечные полоски. Если взять половину резинового полого шара и прорезать дырку в нем, не прилагая давления, прорезь сама закроется. Под давлением эта прорезь с легкостью открывается. Рот открывается под давлением веса челюсти. Чтобы широко открыть рот, нужен осознанный сигнал мышцам. Чтобы держать рот закрытым, не нужно большого усилия. Эти знания тебе пригодятся.
 Очень важны маленькие лентообразные мышцы, которые растягивают рот. Их еще называют «мышцами улыбки». Они также задействованы в процессе надувания щек, взаимодействуют с плотью. Когда они сокращаются вверх по диагонали, получается улыбка. Только задумайтесь, насколько уникален этот механизм и насколько точен! Запомни их как «мышцы счастья». Они крепятся к скулам и направлены вниз по диагонали щек к мышцам, которые находятся вокруг губ.
Очень важны маленькие лентообразные мышцы, которые растягивают рот. Их еще называют «мышцами улыбки». Они также задействованы в процессе надувания щек, взаимодействуют с плотью. Когда они сокращаются вверх по диагонали, получается улыбка. Только задумайтесь, насколько уникален этот механизм и насколько точен! Запомни их как «мышцы счастья». Они крепятся к скулам и направлены вниз по диагонали щек к мышцам, которые находятся вокруг губ.
Есть мышцы, которые располагаются на боку носа и направлены вниз к подбородку, минуя уголки рта. Их называют «мышцами грусти». Будучи прикрепленными вокруг носовой кости одним концом и к челюсти другим, они могут растянуть губы вверх в оскале, или вниз в ухмылке. Активные на обоих концах, эти мышцы позволяют человеку скалить зубы, как зверь. Эти мышцы также работают, когда ты чистишь зубы.
Они рефлекторно сокращаются, когда ты поднимаешь большой вес, либо когда тело испытывает повышенную физическую нагрузку, бег например.

Ямочка или линия, возникающая в нижней части щеки во время улыбки обусловлена небольшим пространством между «мышцами грусти» и челюстной мышцей. В пожилом возрасте это явление становится более выразительным (линия). В юном возрасте, в большинстве случаев, это ямочка. Все остальные мышцы лица простые, их называют «мышцами морщин». Одна из них находится в уголке брови ближе к носу. Она поднимает угол брови, и человек выглядит обеспокоенным или виноватым в чем-то.
Еще «мышцы грусти» находятся внутри угла брови. Нахмуренный человек – их работа. Две «мышцы морщин» над бровями морщат лоб, так как они находятся под кожей и крепятся к ней.
Еще две «мышцы морщин» находятся на кончике подбородка. Напряжение этих мышц приводит к тому, что появляется ямочка в середине подбородка. Это также приводит к появлению маленьких бугорков на подбородке при некоторых выражениях лица.
Как нарисовать голову человека: краткое руководство
Мне часто задают вопросы: как нарисовать портрет и добиться сходства с оригиналом (или хотя бы с человеком). Ответ настолько прост, насколько одновременно и сложен.
Чтобы правильно нарисовать голову человека, вам надо правильно уловить пропорции головы. А чтобы это сделать наиболее достоверно, необходимы знания анатомии.
Что нужно знать, чтобы нарисовать голову человека?
Особенность №1
Череп мы рассматриваем как костную основу, а голову, как совокупность всех форм и частей: органы чувств, мышцы, хрящи, волосы и т. д.
д.
Череп человека состоит из 2-х отделов: мозгового и лицевого.
Мозговой отдел черепа соответствует окружности с R=1/3 от высоты головы.
Особенность №2
Для ориентира определения пропорций и основных осевых линий можно использовать 2 варианта:
1) Пропорции выделенные на слайдах красным цветом делят всю высоту головы на 3 величины.
2) Пропорции зеленого цвета делят лицевой отдел черепа на 3 высоты.
Особенность №3
Череп человека в профиль условно можно вписать в квадрат.
Мозговой отдел имеет яйцеобразную форму.
Основание черепа лежит на горизонтальной линии, проведенной от носовой ости до конца затылка.
Особенность №4
Глазная ось является серединой черепа.
Особенность №5
Носовая ость (относится к черепу) и основание носа (относится к голове) являются разными терминами.
Особенность №6
Наружный слуховой проход лежит на середине расстояния от лба до затылка.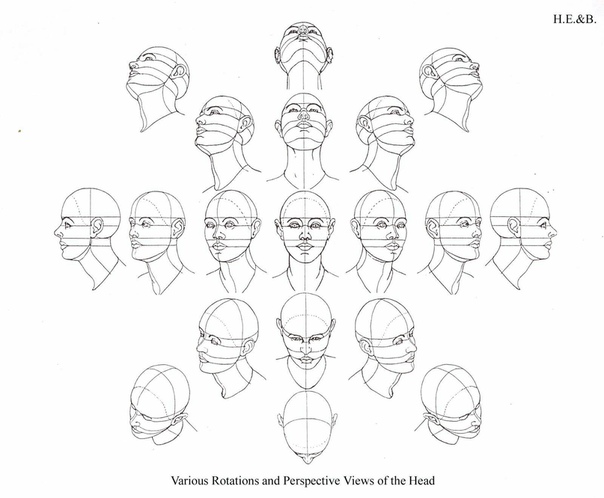
Особенность №7
Линия рта – это примерно половина высоты от вершины носа до подбородка.
Ухо имеет одинаковую высоту с носом. Высота носа занимает 1/3 от высоты лицевого отдела (пропорции зеленого цвета).
Особенность №8
Данные пропорции головы человека не являются стабильными величинами.
Они могут меняться в зависимости от индивидуальных особенностей человека.
Научившись простаивать правильно основной объем головы, вы уже без труда впишите в него индивидуальные черты лица вашей натуры (форму носа, разрез глаз, контур губ, изгиб бровей).
Поэтому для начинающего художника так важно начинать рисовать портрет не с отдельных деталей (например, с глазика), а с общего объема.
2.2. Тема. Рисунок головы человека (обрубовка). Рисование головы человека (обрубовка) в повороте ¾. Изображение конструктивной основы головы человека, ее симметричной формы и частей с учетом перспективы, передача объема посредством светотени. Модель выше
Модель выше
2.2. Тема. Рисунок головы человека (обрубовка). Рисование головы человека (обрубовка) в повороте ¾. Изображение конструктивной основы головы человека, ее симметричной формы и частей с учетом перспективы, передача объема посредством светотени. Модель выше уровня глаз. Фон светло серый. Освещение боковое, средней интенсивности. Формат А3. Материал – графитный карандаш.
Цель: Продолжение знакомства с конструкцией головы человека.
Задачи: Грамотно закомпоновать изображения в листе; передать конструктивную
основу головы человека, симметричность формы с учетом перспективы, объем посредством светотени.
Оборудование для преподавателя:
Бумага (А3), образцы работ учащихся ДХШ, карандаш графический , ластик, презентация к уроку.
Оборудование для обучающихся:
Бумага (А3), графический карандаш, ластик.
Ход урока:
1.Организационный момент.
2.Объяснение темы
3.Показ последовательности выполнения
задания
4.Практическое выполнение работы.
5.Подведение итогов. Самостоятельная работа.
1.Организационный момент.
Приветствие, проверка готовности к уроку: дети сидят за мольбертами, на мольбертах закреплен лист формата А3.
2.Объяснение темы.
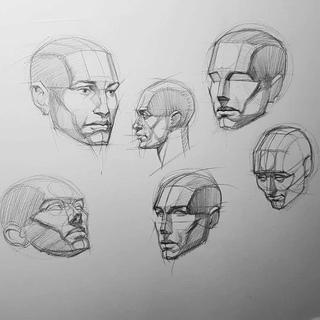
Метод обрубовки был разработан в эпоху Возрождения Альбрехтом Дюрером и прочно введен в процесс обучение молодых художников XIX века французом Александром Дюппюи. Без тщательной тренировки на изображении гипсовых слепков, ученики Дюппюи не переходили к написанию портретов реальных людей. Обрубовка – это рисунок или гипсовая фигура человеческой головы, разбитая на множество плоскостей. Относится к конструктивному разделу дисциплины академического рисунка. Отдельно выделяют обрубовку лица, обрубовку носа и других его частей.
Относится к конструктивному разделу дисциплины академического рисунка. Отдельно выделяют обрубовку лица, обрубовку носа и других его частей.
Начинающие художники рисуют ее для понимания особенностей и закономерностей строения головы человека. Анализ конструкции, каркаса предмета – важный шаг к профессиональному написанию картин. Не понимая внутреннего строения чего-либо, сложно изобразить его внешние данные. Поэтому в академическом рисунке обрубовка головы делится на два вида – обрубовочное изображение черепа и непосредственно целостной головы.
3.Показ последовательности выполнения задания.
1)Сперва нам нужно определить, где будет находиться наша голова в листе бумаги ( формат А3 или А2) . Для этого наметим габаритные размеры, вымеряв соотношения ширины и высоты изображаемого объекта. Лучше всего оставить больше места со стороны лицевой части.
2) Дальше наметим общий объём головы, определим ракурс, нахождение лицевой части в вашем ракурсе.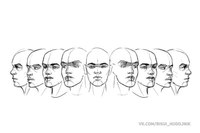
3) поделим лицо на пропорциональные части лица (в данном ракурсе средняя линия глаз расположена по середине) наметим кончик носа, переносицу, надбровные дуги, среднюю линию рта, подбородок.
4) Найдём наклон самой головы, и линии лицевых частей в перспективе (происходит сокращение). Что ближе к нам, кажется больше, что дальше — меньше, то есть сокращается.
5)Найдём под каким углом нос, построим осевую для лицевой части. Начинаем с построения носа.
6) Всё зависит от нашего ракурса, если мы находимся ниже изображаемого объекта, мы видим нижнюю грань носа, если справа от объекта — правую грань носа, и фронтальную, в перспективе. (как в нашем случаи. Вот примеры построения носа обрубовкой. Построение головы (метод обрубовки).
7) Таким же образом построим и другие части лица:
1. Глаза.
Глаза.
2. Губы и подбородок.
Следует строить по граням всё лицо и голову. И в результате мы получим это:
РАБОТА НАД ШТРИХОВКОЙ
1) Определим с какой стороны падает свет.
В нашем случае Сверху справа.
В таком случае грани на которые попадает прямой свет самые светлые, на которые скользящий свет — чуть темнее, самые тёмные грани отвёрнуты от света. Следует не забывать о рефлексах, но они не светлее чем свет. Если вы рисуете гибсовую голову (как в моём случае) не забывайте об материальности гибса. Следует усилить пограничные контрасты, и сделать ярче рефлексы и свет.
В итоге вот что получится: Построение головы (метод обрубовки).
4.Практическое выполнение работы.
1) Первый этап работы. Сначала на листе бумаги формат А3, тонкими линиями намечают композицию, то есть как будет расположена голова: намечаются габаритные размеры, соотношение длинны и высоты, оставляя больше места от края листа до лицевой части, чем от затылка.
2) Второй этап работы. Намечается общий объем, определятся ракурс. В начале работы форму головы можно условно представить в виде куба, в который вписаны все остальные формы. При этом череп имеет фронтальную часть, две боковые, затылочную и свод.
3) Третий этап работы. Лицевая часть делится на пропорциональные части, также находим осевую линию, намечаем нос, переносицу, надбровные дуги, среднюю линию рта, подбородок.
4) Четвертый этап работы. Уточняем перспективное построение головы, представив себе, где находятся точки схода ее сторон. Также уточняем угол ее наклона.
5) Пятый этап работы – перспективное построение частей лица и граней обрубовки.
6) Шестой этап – формирование объема головы посредством светотени. Для начала следует определить, откуда падает свет. Потом мысленно делим голову на свет, тень и полутень и начинаем наносить штрихи по форме. В процессе шриховки мы выделяем в свете, тени и полутени свои свет, тень и полутень, именно за счет этого голова будет выглядеть объемной. Плотность тона добивается за счет слоев штриховки.
Плотность тона добивается за счет слоев штриховки.
7) Седьмой этап работы. Выделяем с помощью штриховки самые контрастные места, а также с помощью ластика уточняем рефлексы.
5.Подведение итогов. Самостоятельная работа.
Анализ и оценка работ. Обучающиеся выставляют выполненные работы на мольбертах для общего просмотра. Самостоятельная работа: конструктивный рисунок обрубовки по памяти. (Формат А4)
10 мифов о переносе головки блока цилиндров
Об авторе: Дэйв Локалио — наш давний друг и владелец / оператор Headgames Motorworks, специалиста по головкам блока цилиндров, основанного в Нью-Джерси в 2001 году. Дэйв и его команда накопили огромный опыт и знания, и в настоящее время создают одни из самых эффективных комплектов головок цилиндров и кулачков как для отечественных, так и для импортных автомобилей, будь то для использования на улицах и полосах движения или для полномасштабных гонок.
Миф №1.ЧПУ «лучше»
Это зависит от детали в станке. Если вы делаете головки для заготовок, стоит поговорить о точности ЧПУ, потому что вы делаете что-то с нуля, а изготовление партии гарантирует, что все они будут одинаковыми. Но когда дело доходит до обработки с ЧПУ заводской литой головки блока цилиндров, говорить о точности станка — спорный вопрос. Я говорю это, потому что заводская голова отлита, а это значит, что от головы к голове будут некоторые отклонения из-за недостатков, возникающих в процессе литья.Вот здесь-то и вступают в игру слова «сдвиг сердечника», потому что, когда мы получаем отлитые головы из цехов с ЧПУ, нет абсолютно одинаковых. На самом деле в голове нет одинаковых портов. Вы даже можете увидеть, где ЧПУ не касалось литья в одном порте, но касалось других. Это потому, что станок с ЧПУ не знает, где находятся порты, а только там, где они должны быть. Между тем, рука каждый раз знает центр этого порта. Итак, что это значит?
Хотя ЧПУ во многих делах лучше, чем рука, когда дело доходит до переноса заводской литой головки блока цилиндров, оно действительно просто быстрее, а это означает, что он быстрее, чем любой человек мог бы шлифовать и шлифовать вашу голову.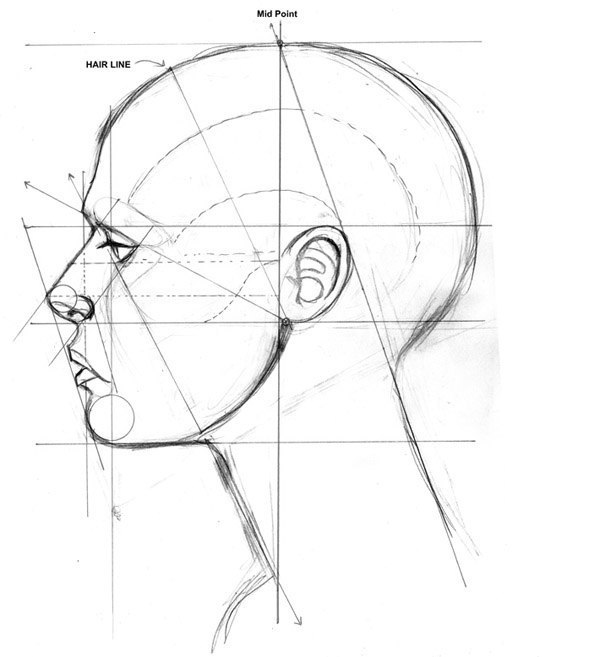 Таким образом, вместо того, чтобы ждать недели или месяцы, чтобы получить его обратно из механического цеха, кто-то с ЧПУ может разорвать его за несколько часов и поставить на полу, готовый для работы на станке. Говорить о согласованности обработки противоречивой детали не имеет смысла, кроме как продавать ее как лучший вариант. Однако из-за того, что есть ребята с головками блока цилиндров, которые делают такую плохую работу по переносу вручную, по-видимому, не взяв уроки у слепого человека с молотком и зубилом, они помогают увековечить миф о том, что перенос с ЧПУ более точен или «лучше».
Таким образом, вместо того, чтобы ждать недели или месяцы, чтобы получить его обратно из механического цеха, кто-то с ЧПУ может разорвать его за несколько часов и поставить на полу, готовый для работы на станке. Говорить о согласованности обработки противоречивой детали не имеет смысла, кроме как продавать ее как лучший вариант. Однако из-за того, что есть ребята с головками блока цилиндров, которые делают такую плохую работу по переносу вручную, по-видимому, не взяв уроки у слепого человека с молотком и зубилом, они помогают увековечить миф о том, что перенос с ЧПУ более точен или «лучше».
Миф №2. Димпл Порты
Раз уж мы затронули эту тему, мы должны коснуться ямок на портах. Аргумент состоит в том, что он работает с мячами для гольфа, потому что создает пограничный слой воздуха и помогает ему перемещать мяч все быстрее и дальше. В порту мы стремимся создать ситуацию, при которой топливо остается за стенкой порта. Таким образом, ямочки (теоретически) помогли бы создать этот пограничный слой воздуха, который удерживал бы топливо от стенок, в состоянии неопределенности и распыления.
Во-первых, если вы читаете это, более чем вероятно, что у вас есть двигатель с современным впрыском топлива. Современные топливные форсунки отлично справляются с распылением топлива, особенно в современных двигателях, где расположение форсунок спроектировано очень тщательно для оптимизации подачи. Итак, единственное реальное преимущество, которое я вижу в отверстиях с ямочками, — это если вы играете диском с головкой блока цилиндров и хотите посмотреть, на сколько дальше вы можете ее бросить. Если бы была какая-то реальная основа для отверстий с углублениями, вы бы увидели их в высокопроизводительных заводских двигателях и гоночных двигателях профессионального уровня, а это просто не так.
Миф №3. Зеркальная полировка
Чарли Калп научил меня гринду. Этот человек работал с Смоки Юник еще в 1960-х годах (посмотрите это имя в Google, если вы не знакомы со Смоки, он — легенда гонок и новатор на уровне, которого мало кто мог коснуться), и когда они запускали вещи в NASCAR, они пробовали зеркало полировка на головках. Это не работало тогда и не будет работать сейчас. Причина в том, что когда вы делаете стенки порта слишком гладкими, воздух движется так быстро и прилипает к стенкам порта, так что топливо выпадает из суспензии, вызывая непостоянную подачу топлива в камеру сгорания.
Миф 4. Больше — лучше
Сделать порт настолько большим, насколько это возможно, очень просто. И все мы знаем, что если бы это было легко, все бы этим занимались. Но это своего рода проблема. Есть больше мест, которые верят в эту теорию, чем нет. Итак, вы получаете индустрию, полную голов, которые отлично справляются с подъемом 0,500, но ленивы в машине. Потому что скорость означает больше, чем поток! Воздушный поток что-то значит, а большие порты и большие клапаны не равны скорости воздуха.Проще говоря, крупная фигура сияет на скамейке запасных, но бежит как собака, убегая по машине.
«Успех будет»
Это может звучать как что-то из книги Мэри Шелли Франкенштейн , но возможность первой в мире трансплантации головы человека вполне реальна. В декабре 2017 года итальянский нейробиолог доктор Серджио Канаверо планирует провести эту процедуру вместе с командой китайских хирургов во главе с доктором Сяопином Реном, который на сегодняшний день провел около 1000 трансплантаций головы мышам.
Поделиться в Pinterest Канаверо (на фото) говорит, что цель трансплантации головы человека — вылечить неизлечимые неврологические расстройства и истощение мышц, вызывающие паралич.Изображение предоставлено: Facebook
Процедура, названная HEAVEN-GEMINI, займет около 36 часов около 150 хирургов и медсестер и будет стоить около 11 миллионов долларов.
Доктор Канаверо из Туринской группы продвинутой нейромодуляции (TANG) в Италии впервые объявил о своем предложении по проекту HEAVEN-GEMINI еще в июле 2013 года.
Неудивительно, что его предложение было встречено большой критикой, и некоторые ученые заклеймили доктора Канаверо как «чокнутого».
Однако доктор Канаверо не первый хирург, который погрузился в мир пересадки головы. В 1970 году покойный американский нейрохирург доктор Роберт Уайт первым пересадил голову обезьяны на тело другой обезьяны.
В то время как обезьяна-реципиент имела способность видеть, слышать, ощущать вкус и обоняние после процедуры, отсутствие необходимых технологий означало, что нервы спинного мозга животного не были должным образом сращены с его головой, что привело к его параличу.Кроме того, иммунная система животного отвергла донорскую голову, в результате чего она умерла через 9 дней.
Хотя доктор Канаверо признает, что слияние спинного мозга (SCF) и возможность отторжения головы по-прежнему являются ключевыми проблемами для проекта HEAVEN-GEMINI, он утверждает, что недавние исследования на животных показывают, что их можно преодолеть.
«Самым большим техническим препятствием для таких усилий, конечно же, является восстановление соединения спинного мозга донора и реципиента. Я считаю, что технология такой связи существует только сейчас », — сказал он в статье, опубликованной в журнале Surgical Neurology International .
Даже если сама процедура выполнима, как считает доктор Канаверо, остаются вопросы: каковы преимущества трансплантации головы? И сможет ли организм полностью оправиться от такого травмирующего события? Медицинские новости Сегодня поговорил с доктором Канаверо, чтобы получить некоторые ответы.
«Мы собираемся удалить одну голову при глубоком переохлаждении и переустановить ее на новое тело. Конечно, мы говорим о голове с совершенно здоровым мозгом, но с инопланетным телом — так что о теле без надежды », — сказал доктор.Канаверо сообщил MNT .
Голова реципиента и тело донора будут переведены в режим гипотермии примерно на 45 минут, чтобы ограничить любые неврологические нарушения, которые могут возникнуть из-за кислородной недостаточности.
Голова будет удалена из тела донора с помощью «сверхострого лезвия», чтобы минимизировать повреждение спинного мозга — процесс, по словам итальянского хирурга, является ключевым для успешной SCF.
Затем следует самая сложная часть: прикрепление головы реципиента к телу донора, что включает сложный процесс SCF.В своей первоначальной статье доктор Канаверо объяснил, что химические вещества полиэтиленгликоль или хитозан будут использоваться для стимулирования слияния до того, как будут зашиты мышцы и кровоснабжение.
В то время как многие ученые выражали озабоченность по поводу осуществимости процесса SCF, доктор Канаверо сказал MNT , что его это не беспокоит.
«Возможность слияния спинного мозга была достигнута 50 лет назад», — сказал он. «Невероятно то, что никто не обратил на это внимания в то время, потому что парень, который действительно справился с этим, был американским функциональным нейрохирургом, который сделал это невероятное, поразительное наблюдение, что всякий раз, когда вы перерезаете спинной мозг с минимально травматичным разрывом, и вы ждете долго хватит — вот и вся хитрость, не 1 день, не 1 неделя, не 1 месяц, а несколько месяцев — тогда животные начинают переделывать.
«Что касается SCF, то с данными мы уже пришли», — добавил он. «И то, что действительно накопилось за последние 50 лет, что было невероятно потеряно до сих пор, просто поможет нам ускорить процесс — ни больше, ни меньше».
После операции реципиент будет помещен в кому на 3-4 недели. Это необходимо для того, чтобы избежать движения шеи, давая время новым нервным связям срастаться.
В период комы реципиент также будет подвергаться электростимуляции через имплантированные электроды; есть надежда, что это даст импульс SCF.
Слова «тело без надежды» лежат в основе проекта HEAVEN-GEMINI; он направлен на помощь людям с неизлечимыми неврологическими заболеваниями или истощением мышц, из-за которых они полностью парализованы от шеи до низа.
Если удастся вылечить такие состояния, можно было бы приветствовать трансплантацию головы как медицинский прорыв, но доктор Канаверо сказал MNT , что он воспринимает процедуру в другом свете:
«Речь пойдет о лечении неизлечимых неврологических расстройств, от которых другие методы лечения потерпели неудачу, поэтому генная терапия, стволовые клетки — все это ни к чему не привело.Мы потерпели неудачу, несмотря на миллиарды долларов, вложенные в такого рода исследования.
Итак, пересадка головы или тела, под каким бы углом вы ни смотрели, на самом деле — это провал медицины. Это не блестящий успех, а блестящее достижение медицинской науки. Когда вы просто не занялись биологией, вы не знаете, как лечить гены, вы действительно не понимаете, и вам действительно нужно прибегать к пересадке тела, это означает, что вы потерпели неудачу. Так что это не должно рассматриваться как успех медицинских исследований.”
Тем не менее, нет никаких сомнений в том, что если процедура сработает, она потенциально может помочь людям во всем мире, живущим с параличом. И один человек, который твердо верит в это, — 30-летний россиянин Валерий Спиридонов.
Еще в июне MNT сообщало, что Спиридонов станет первым человеком, которому сделают пересадку головы.
У Спиридонова редкое генетическое заболевание, называемое болезнью Верднига-Гофмана — форма спинальной мышечной атрофии (СМА1).Заболевание вызвано потерей мотонейронов в спинном мозге и стволе мозга, что приводит к потере мышечного контроля.
«Сейчас я с трудом могу управлять своим телом. Мне нужна помощь каждый день, каждую минуту », — сказал Спиридонов MailOnline ранее в этом году. «Мне сейчас 30 лет, хотя люди с этим заболеванием редко доживают до 20 лет».
Хотя Спиридонов признал, что обеспокоен рисками операции, он считает, что его участие в проекте доктора Канаверо может изменить не только его жизнь к лучшему, но и жизни других людей, страдающих параличом.
«Операция направлена на восстановление независимости тяжелобольных», — сказал он ITV News в прошлом месяце. «Если он будет успешным, он поможет тысячам людей, которые в будущем находятся в еще более плачевном состоянии, чем я».
Спиридонов подробнее рассказывает о своем решении пройти процедуру в видео ниже:
Однако, несмотря на предыдущие сообщения, доктор Канаверо сказал MNT , что, хотя он уверен, что Спиридонову будет сделана трансплантация головы, теперь он не будет первым. тема.
«27 августа Китай и я парафировали контракт — программу сотрудничества, которая приведет прямо к первой пересадке головы в Китае где-то к концу 2017 года, если все пойдет по плану», — сказал доктор Канаверо MNT .
«К сожалению, в китайской программе нет места Валерию», — добавил он. «Китайцы не собираются трансплантировать русского, они собираются пересадить китайца».
Китайскую программу возглавит известный хирург д-р.Сяопин Жэнь из Харбинского медицинского университета в Китае. Доктор Рен уже провел около 1000 операций по пересадке головы мышам, и он ранее уже выразил свое желание провести эту процедуру на людях.
«Доктор. Сяопин Жэнь — очень умный и талантливый хирург, — сказал нам доктор Канаверо. «Теперь проблема в Китае и для Сяопина Жена — найти подходящее место в Китае для проведения процедуры. В Китае есть места, которые хотели бы принять участие, поэтому китайцы должны решить эту проблему.
Помимо заключения контракта на процедуру в Китае — с хорошими перспективами проведения операции Спиридонову в России — проект теперь получил поддержку из США в виде доктора Майкла Сарра из Mayo Clinic, кто является главным редактором журнала Surgery .
«Я рад сообщить, что Майкл Сарр спонсировал наш проект — в начале следующего года у нас будет мини-симпозиум со всеми задействованными науками и деталями», — сказал нам д-р Канаверо.
Но, несмотря на то, что проект набирает обороты, можно с уверенностью сказать, что он продолжает вызывать критику.
«Это настолько грандиозный проект, что вероятность того, что он произойдет, очень маловероятна», — сказал ранее в этом году Гарри Голдсмит, клинический профессор неврологической хирургии Калифорнийского университета в Дэвисе. «Я не верю, что это когда-либо сработает, слишком много проблем с процедурой. Пытаться сохранить кого-то здоровым в коме на 4 недели — этого не произойдет.
Но д-р Канаверо сказал, что приветствует такую критику, отметив, что она продвигает его работу вперед:
«Мир движется, количество критиков уменьшается. Конечно, критики найдутся всегда. Наука учит нас, что, когда вы предлагаете что-то новаторское, вы должны столкнуться с критикой. Если критики не выступят, значит, вы ничего особенного не скажете ».
В связи с процедурой также был поднят ряд этических проблем, в частности, по поводу того, как тело и мозг восстановятся после операции.
Поделиться на Pinterest Хотя высказывались опасения по поводу того, как мозг адаптируется к новому телу, доктор Канаверо считает, что это не проблема.«Если вы наденете новую голову на тело, вы, скорее всего, создадите сумасшедшего, потому что нейронные входы — химия — будут совершенно другими», — Артур Каплан из отдела этики Медицинского центра Нью-Йоркского университета в Лангоне. Нью-Йорк, штат Нью-Йорк, написал в комментарии в мае.
«Мозг полностью запутался», — добавил он.«Это было бы не только неэтично, потому что у нас нет науки, но и неэтично даже думать об этом из-за значительного риска создания кого-то, кто будет сумасшедшим, сумасшедшим или замученным».
Доктор Канаверо сказал MNT , что его не беспокоит безопасность мозга во время или после процедуры:
«Опыт есть, и он говорит нам, что это возможно. Вы действительно можете защитить мозг, доктор Уайт уже сделал это на обезьянах, но одна и та же технология — с некоторыми адаптациями, конечно, — снова и снова проверялась на людях, поэтому меня это не беспокоит.Кроме того, получатели доноров разделены не более чем на 2,5 метра, а снятие головы после ее прикрепления к телу занимает всего несколько секунд ».
Когда дело доходит до адаптации мозга к новому телу, доктор Канаверо утверждает, что существует множество свидетельств того, что это возможно.
«Я почти уверен, что мозг способен адаптироваться и вписываться в новое тело путем переназначения и перенастройки; у нас есть много доказательств того, что это возможно », — сказал он нам. «Кроме того, пациент будет погружен в иммерсивную виртуальную реальность, которая является способом воссоздать в мозгу этот образ всего тела.У нас уже есть опыт, ощущение того, каково быть во всем движущемся теле ».
Само собой разумеется, что до того момента, когда будет проведена первая в мире трансплантация головы, и даже после этого, процедура будет предметом множества споров.
Вылечит ли процедура от паралича тысячи людей? Или это войдет в историю как неудавшаяся попытка кого-то, кого другие называют «сумасшедшим» ученым? Время покажет.
Однако доктор Канаверо уверен, что всего через 2 года он и его китайские коллеги завершат первую в мире трансплантацию головы человека:
«Это будет успех.Ко всему этому применяется поэтапный и безрисковый подход. Если первый шаг не сработает, мы продолжим работу над ним, пока он не сработает, продолжим и так далее.
Есть подробный план — мы не просто придумываем его в какой-то секретной лаборатории Франкенштейна. Сейчас мы продвинулись вперед в этом проекте, все движется — это больше не научная фантастика ».
Самолеты головы — Художественный манекен-голова Джона Асаро
САМОЛЕТЫ ТЕЛА Уже доступны! В истории искусства эта модель, пожалуй, единственная из когда-либо созданных самолетов этого корпуса! Щелкните здесь для получения дополнительной информации! | |
Манекен «Оригинальные плоскости головы» разработан как инструмент для эффективного и упорядоченного обучения тому, как рисовать и раскрашивать человеческую голову.Модель применима к обоим полам и всем расам, причем вариации возникают только пропорционально. Левая сторона показывает основную структуру плоскостей головы, как видно на округлом или более молодом лице.
Правая сторона показывает более сложную структуру, характерную для более худого и или более старого лица. Эта голова-манекен была задумана в надежде принести пользу всем художникам, от начинающих студентов до профессионалов. Он предназначен как для самостоятельного использования, так и для использования в классе.
В рамках академического упражнения Плоскости головы предлагает реалистичный подход к пониманию света и плоскостей при моделировании головы человека.
Определение: тело головы состоит из французских кривых и овалов. На всех этих поверхностях есть более плоские и вогнутые области, которые мы называем плоскостями (они не плоские). Манекен «Самолеты головы» — это трехмерная карта, показывающая, где все эти плоскости находятся на голове и как они связаны друг с другом. Эта голова манекена имеет все мыслимые плоскости. Мы не предлагаем, чтобы у каждой головы были все эти самолеты — их нет. Тем не менее, мы говорим, что все головы имеют некоторые из этих плоскостей, и что у людей есть основные плоскости, показанные на странице 24 буклета, который прилагается к манекену «Плоскости головы», и новая голова манекена, называемая «запомненной».«
Все головы сделаны из светло-серого пластика (за исключением голов африканских экзотических и африканских мужчин, которые имеют темно-серый цвет).
Специальное предложение:
Каталог Bella Donna, 3 $ при покупке любой головы
5 Больше хардтейлов с экстремальной геометрией
Учитывая угол наклона головы Chromag Doctahawk 62 градуса и радиус поворота 500+ мм ранее на этой неделе, мы подумали, что было бы благоразумно собрать еще несколько хардтейлов с дикой геометрией.Знаете, для тех, кто хочет, чтобы передняя часть была более расслабленной, чем у велосипеда для скоростного спуска, а задняя часть — более грохочущей, чем баллончик с краской.
Подтяните лодыжки, мы входим.
Nicolai Argon GLFНемецкие мастера по сварке Николай, очевидно, вдохновились на создание этого хардтейла британцем со склонностью к прогрессивной геометрии, который любил всепогодную поездку. В результате получился мотоцикл по образцу более смелых предложений Николая, но с жесткой задней частью. Он большой, слабый, и есть опция коробки передач Pinion для всех, кто хочет полный хипстерский хардтейл.
Ключевые номера
Ход — 150-170 мм
Вылет — 475 мм (самый длинный размер)
Угол наклона рулевой трубы — 63 °
Колесная база — 1267 мм (самый длинный размер)
Цена — 1499 евро (только рама)
Подробнее
Sick Bicycles WulfЗнаменитые наживки для троллей У Sick Bicycles есть несколько экстремальных велосипедов в своих конюшнях, и они заработали устрашающую репутацию в Интернете и за его пределами. Wulf (теперь известный как Wulf OG) — это стальная рама 4130 по минимальной цене, но без возможности отмены и предварительного заказа.Это далеко не самая радикальная их рама, и они даже называют ее трейловым байком. Для более экстремальной версии обратите внимание на Wulf LTD, который опускается до угла 62 °.
Номера позиций
Ход — 150 мм
Вылет — 475 мм (большой размер)
Угол наклона рулевой трубы — 63 °
Колесная база — Н / Д
Цена — 490 фунтов стерлингов (только рама)
Подробнее
BTR BelterBTR имеют долгое время были королями этой игры и до сих пор создают классический хардтейл Belter, который они впервые начали тестировать в начале десятилетия.Эта рама разработана как идеальный хардтейл для скоростного спуска, но самая известная из них — это несравненный угол наклона головы 61 ° на 26-дюймовой версии, который был лишь немного уменьшен до 61,5 °, когда появилась версия 650b.
Номера позиций
Ход — 150-160 мм
Вылет — 450 мм (большой размер)
Угол наклона рулевой трубы — 61 °
Колесная база — 1242 мм (большой размер)
Цена — 1000 фунтов стерлингов (только рама)
Подробнее
Pole Taival Вы не могли ожидать статьи с экстремальной геометрией без упоминания Pole, не так ли? Taival — их набег на рынок хардкорных хардтейлов, и, хотя это, конечно, не самый экстремальный пример здесь, это все еще дикий фрейм.Taival также принимает здесь вариант вилки с самым коротким ходом, что может объяснить его сравнительно консервативный угол наклона головы 64,5 °.
Ключевые цифры
Ход — 130-150 мм
Вылет — 510 мм (большой размер)
Угол наклона рулевой трубы — 64,5 °
Колесная база — 1295 мм (большой размер)
Цена — 700 евро (только рама)
Подробнее
Pipedream Moxie Pipedream Moxie сочетает в себе угол наклона головы 65,5 ° с огромным радиусом действия 510 мм, что делает его самым крутым мотоциклом здесь, но также и одним из самых длинных.Эта британская рама CroMo, готовая к созданию как 29-дюймового велосипеда, так и длинноходного велосипеда 27,5+, безусловно, выглядит как нельзя лучше. Pipedream пришлось использовать трубки, изготовленные на заказ, чтобы получить желаемую форму, а их стыковые профили избегают использования косынок. В результате получаются чистые линии и сверхпрочные суставы.
Ключевые номера
Ход — 160 мм (27,5 дюйма), 140 мм (29 дюймов)
Вылет — 510 мм (большой размер)
Угол наклона рулевой трубы — 65,5 °
Колесная база — 1239–1255 мм (большой размер)
Цена — 629 фунтов стерлингов (только рамка)
Подробнее
Новый взгляд на то, как люди оценивают свое окружение; определение ориентации головы и ее роль в «создании» окружающей среды [PeerJ]
Введение
Аристотель, как сообщается, сказал, что «зрение … это чувство, дающее наибольшее знание и превосходное в различении» (Jonas, 1954; Nasar, Hecht & Wener, 2008), поэтому неудивительно, что такая значительная часть человеческого мозга используется для обработки визуальной информации (Mishkin, Ungerleider & Macko, 1983).Поэтому неудивительно, что зрение играет такую ключевую роль в структурировании человеческого восприятия окружающей среды (Hansen & Ji, 2010) и во влиянии на поведение (Cerrolaza, Villanueva & Cabeza, 2012). Соответственно, физиология, анатомия и функционирование глаз были предметом интереса на протяжении десятилетий (см., Например, Walls, 1942).
Центральная природа зрения в исследованиях, изучающих, как люди двигаются и ведут себя, привела к исследовательским усилиям, которые пытаются определить визуальное внимание, уделяемое объектам в окружающей среде (Arrington et al., 2000). То, что мы на самом деле видим, определяется тремя вещами: ориентацией тела, отношением головы к телу и положением глаз внутри головы. Несмотря на актуальность всех трех, наиболее распространенным методом исследования естественной работы глаз является «отслеживание взгляда», при котором для определения ориентации глаза традиционно используется камера (Cleveland, Cleveland & Norloff, 1993) и производится оценка естественных характеристик глаз. движения глаз, такие как «фиксации» и «пути сканирования» (Cooke, 2005). Усовершенствования методов отслеживания взгляда привели к появлению множества публикаций, которые позволили охарактеризовать движение глаз, изучить диапазон восприятия и контроль движения глаз (Rayner, 1998) и показать силу этого быстро расширяющегося поля (Duchowski, 2002). ).
Глаза могут, однако, отслеживать объекты только в том случае, если голова ориентирована таким образом, что объекты находятся в пределах потенциального поля зрения (в первую очередь определяется функциональным диапазоном движений глаз (Stahl, 1999, EBR). Короче говоря, нормальное положение головы и ожидается, что движения головы (Munhall et al., 2004) будут играть важную роль в определении секторов окружающей среды, в которых люди находят элементы для визуального внимания (Morasso, Bizzi & Dichgans, 1973). в «обрамлении окружающей среды», и поэтому ее рассмотрение должно представлять интерес для исследований, направленных на определение факторов, которые приводят к деталям того, как мы на самом деле это делаем.В частности, мы ожидаем, что особенности окружающей среды будут модулировать отношения, принимаемые головой (наклон головы и направление головы), потому что ожидается, что голова повернется, чтобы сосредоточить взгляд на интересующих объектах, в то время как в то же время люди предположительно будут только уметь визуально реагировать на элементы, которые находятся в поле зрения, обеспечиваемом положением головы.
Мы предлагаем подход к рассмотрению этой сложной темы, сообщив о разработке и первом использовании новой системы для отслеживания движения головы человека, персональной платформы наблюдения с интерфейсом человека — HIPOP.Это устройство основано на использовании ежедневного дневника с поддержкой GPS (Wilson, Shepard & Liebsch, 2008), который представляет собой устройство, содержащее тщательно подобранный набор датчиков, включая акселерометры и магнитометры. Устройство крепится к легко носимому подголовнику и может использоваться для измерения ориентации головы участников в естественных условиях. Мы опробовали использование HIPOP на людях, идущих по безликим коридорам и в ботаническом саду, и описали первые результаты, предложив причины наблюдаемых моделей поведения головы.
Метод
Конструкция устройства
HIPOP состоит из ежедневного дневника (DD) с поддержкой GPS (Wilson, Shepard & Liebsch, 2008) (поставщик Wildbyte Technologies — http://www.wildbyte-technologies.com/), состоящего из двух печатных плат, одна из которых несет модуль GPS (26 × 27 × 5,5 мм, масса 2,5 г) с использованием Origin 1410 GPS и еще один модуль, который состоит из основной печатной платы для Daily Diary с датчиками и процессором (Microchip PIC18F26J53 со встроенной функцией реального времени часы) и память (Sandisk MicroSD −1 или 2 Гб) (26 × 27 × 9 мм – масса 3.2 г). Датчики ежедневного дневника: трехосный акселерометр (аналог ADXL345), трехосный магнитометр (Honeywell HMC5883L) и комбинированный модуль барометрического давления и температуры (Bosch BMP085) (рис. 1). Обе платы питаются от одной перезаряжаемой батареи емкостью 300 мАч и упакованы в L-образный корпус с трехмерной печатью из PLA (полимолочной кислоты) пластика, так что ориентация основной печатной платы может быть идеально / плотно прижата к задней части. голова (рис. 2). Во время работы HIPOP потребляет от 7 до 35 мА, в зависимости от частоты дискретизации GPS, и поэтому может использоваться с этой батареей в течение периода от 8 до 42 часов.
Рисунок 1: Принципиальная схема конструкции HIPOP, показывающая совокупность основных компонентов.
Режим работы
Основная предпосылка работы системы заключается в том, что после калибровки положения на голове участника она хранит данные, которые можно использовать для определения угла наклона головы (с помощью акселерометров) и угла ориентации головы относительно магнитного севера. (с использованием данных акселерометров и магнитометров).Эти два параметра вместе могут использоваться для определения точной ориентации головы. Наконец, эта ориентация головы помещается в контекст окружающей среды благодаря подключению системы к GPS, который дает географическое положение владельца.
Во время нормальной работы модуль GPS получает начальное местоположение и определяет текущее время в соответствии с GMT / UTC. Затем Daily Diary регистрирует данные с заданной пользователем частотой, обычно 40 Гц, для бортовых датчиков (акселерометр, магнитометр, температура и давление), в то время как схема GPS регистрирует координаты и время с частотой 1 Гц, если прием позволяет.В конце сеанса регистрации DD загружает координаты GPS и данные с отметками времени и сохраняет их в собственном хранилище данных. Хотя два устройства не регистрируют данные на одной и той же частоте, данные синхронизируются с помощью часов реального времени, инициализируемых при включении питания, и синхронизируются кварцевым генератором для устранения дрейфа часов.
Калибровка и расчет шага и курса
Калибровка прибора
Все устройства, использованные в исследовании, сначала были откалиброваны для реакции на напряженность магнитного поля путем установки их на плоской поверхности относительно каждой из трех осей и вращения на 360 °.Затем угол магнитного падения в месте калибровки использовался в регрессиях угла по сравнению с показаниями датчика для каждой из трех осей магнитометра, чтобы описать (линейную) зависимость перед ее нормализацией для использования при вычислении направления устройства (см. Ниже). Производитель магнитометра HMC5883L (Honeywell, Морристаун, Нью-Джерси, США) указывает точность направления от 1 до 2 градусов для 12-битного выходного сигнала трехосных ортогональных датчиков. Само устройство настроено на диапазон ± 0.88 млрд лет. В связи с переменным характером магнитного поля на поверхности земли, важно установить природу поля как по силе, так и по направлению / полярности для всех трех осей в точке сбора данных. Это делается путем одновременной записи данных акселерометрии для определения ориентации устройства (см. Выше).
Трехосные ортогональные данные акселерометра были записаны с диапазоном ± 16 g и разрешением 4 мг, хотя в нашем случае это было модулировано способом установки системы на головке и калибровкой пользователя. (Смотри ниже).
Определение угла наклона головки
Три акселерометра в HIPOP, измеренные по ортогональным осям, которые были размещены внутри тега, так что после установки на голову участника они измеряли ускорение по осям выброса, вертикальной качки и раскачивания (рис. 2). После развертывания необработанные данные об ускорении от оси помпажа были сглажены в течение 2-секундного окна (80 точек) для получения статического ускорения (полученного из силы тяжести и положения устройства) и исключения ускорения из-за линейного смещения головы ( Shepard et al., 2008a; Shepard et al., 2008b). Таким образом, ось перенапряжения номинально показывала 0 g, когда пользователь HIPOP стоял вертикально и смотрел горизонтально, arcsin которой показывает угол устройства в градусах (Wilson, Shepard & Liebsch, 2008).
Рисунок 2: Изображение участника в шлеме с HIPOP.
(A) Красная стрелка показывает метки, расположенные на оголовье, а (B) показывает HIPOP, состоящий из ежедневного дневника, GPS и батареи вне корпуса.Определение товарной позиции прибора
Для определения заголовка HIPOP использовались методы, подробно описанные в предыдущей работе (Fang et al., 2005; Freescale Semiconductor, 2012) и технический отчет Memsense. Три магнитометра внутри HIPOP, выровненные по ортогональным осям, измеряли силу и направление магнитного поля Земли. Магнитное поле Земли — это приблизительно диполь, состоящий из силовых линий, начинающихся в точке около Южного магнитного полюса и заканчивающихся в точке около Северного магнитного полюса. Сила и направление силовых линий, зарегистрированных трехосным датчиком магнитометра, использовались для определения направления по компасу.
Оси вращения Земли там, где они встречаются с земной поверхностью, определяют географические северный и южный полюса, которые обычно используются для целей навигации. Это не следует путать с истинными магнитными севером и югом, которые определяют точки на поверхности земли, где линии магнитного поля начинаются и заканчиваются. Необработанные показания магнитометра могут использоваться для определения курса относительно магнитного севера, и, чтобы компенсировать это, угол склонения был добавлен к производному курсу, чтобы обеспечить оценку курса относительно географического севера.Угол склонения для географического местоположения можно посмотреть на http://www.ngdc.noaa.gov/geomag-web/#declination.
Показания магнитометров магнитного поля Земли могут искажаться, и, как правило, есть два основных источника ошибок при вычислении курса; твердое железо и мягкое железо. Отложения твердого железа создают магнитное поле, которое вызывает постоянное смещение выходного сигнала. Примеры этого происходят в электрическом оборудовании, таком как громкоговоритель или намагниченное железо.И наоборот, отложения мягкого железа вызваны черными металлами, которые более восприимчивы к магнитному полю. Силовые линии проходят через черные металлы и искажают или растягивают магнитное поле. Искажения из твердого железа, как правило, вносят гораздо больший вклад в ошибки (Cai, Andersen & Malureanu, 2001). Чтобы компенсировать эти ошибки, мы провели процедуру калибровки перед развертыванием. Устройство было повернуто на 360 °, когда оно было горизонтальным по отношению к земле, а затем повернуто на 90 ° и снова повернуто на 360 °.Эта процедура позволила нам определить соответствие показаний магнитометра направлению для каждой оси по отношению к северу, востоку, югу и западу.
Из-за характера HIPOP и положения крепления устройства мы не могли предположить, что устройство было горизонтальным на протяжении всего исследования, поэтому мы использовали компенсацию наклона для корректировки смещения от горизонтальной плоскости. Это было достигнуто путем проецирования каждого измерения с магнитометра на горизонтальную систему координат, где можно было вычислить показания компаса.Атрибут акселерометра использовался для определения применяемых смещений по тангажу и крену.
После развертывания заголовок был получен из необработанных данных магнитометра. Это было предпринято в несколько этапов обработки для определения направления с компенсацией наклона относительно географического севера с учетом источников ошибок от тел из твердого и мягкого железа. Шаги для этого были следующими:
Коррекция центровки
Три оси акселерометра были выровнены с тремя осями осей магнитометра, так что соответствующие оси x , y и z были все в одном направлении.
Расчет тангажа и крена
Для компенсации наклона выхода магнитометра необходимо знать ориентацию устройства по тангажу и крену. Ориентация устройства была рассчитана непосредственно из статической составляющей исходной составляющей ускорения путем передачи необработанного ускорения со скользящим средним за 2 с (Shepard et al., 2008b). Мы можем вычислить статическое ускорение для образца S i с учетом размера окна w по формуле ниже: Si = 1w∑j = i − w2i + w2Sj.Угол наклона ( θ, ) и крена (0̸) были получены путем взятия арктангенса соответствующих статических каналов S x , S y и S z записей акселерометра. Rollγ = atan2Sx, Sy • Sy + Sz • Sz180π Шаг β = atan2Sy, Sx • Sx + Sz • Sz180π.
Коррекция твердого железа
Поскольку отложения твердого железа вызывают постоянное смещение в записях магнитометра, плоское вращение (ось x и y ) отображается на двумерную плоскость, а боковое вращение (ось y и z ) — на отдельная плоскость, никакие отложения твердого железа не должны образовывать круг с центром вокруг начала координат (0, 0) в обоих случаях.Там, где были обнаружены искажения твердого железа, чтобы сместить центр круга от начала координат, мы исправили, найдя минимальные и максимальные значения для каждого канала магнитометра ( м x , м y и м z ) во время периодов калибровки, чтобы вычислить смещение значений магнитометра, чтобы они образовали круг с центром относительно начала координат. Следующие формулы вычисляют скорректированные значения магнитометра для твердого железа (mx ′, my ′ и mz ′): Ox = maxBx + minBx2 Oy = maxBy + minBy2 Оз = maxBz + minBz2 mx ′ = mx − Ox my ′ = my − Oy mz ′ = mz − Oz.
Нормализация данных компаса
Хотя наши магнитометры были откалиброваны для выдачи значений в гауссах, значения, записанные для каждой оси в датчике магнитометра, могут отличаться для одного и того же измерения во всех системах магнитометров, и разные устройства также могут различаться по чувствительности. Чтобы компенсировать это, правильные каналы магнитометра из твердого железа (mx ′, my ′ и mz ′) могут быть нормализованы по длине магнитуды, так что информация о величине из вектора магнитометра удаляется при сохранении важной составляющей направления.Следующие формулы используются для получения нормализованных каналов магнитометра (mx ″, my ″ и mz ″): fm = mx2 + my2 + mz2 mx = mxfm my = myfm mz = mzfm.
Регулировка рамки координат
В идеале устройство должно располагаться на уровне земли для определения курса. Чтобы учесть изменчивость ориентации устройства (потенциальный наклон и крен головки), рамка координат магнитометра была спроецирована на горизонталь.Здесь мы получили ориентацию устройства по тангажу и крену, полученным из атрибутов акселерометра. Каждый нормализованный канал магнитометра с поправкой на твердое железо rmx ″, my ″ и mz ″ был повернут на инверсию шага ( θ ) и крена (0̸), чтобы получить повернутый вектор-столбец m r . Rxθ = 1000 cosθ − sinθ0 − sinθcosθ Ry0̸ = cos0̸0 − sin0̸011sin0̸0cos0̸ mr = RxθRy0̸mxmymz.
Коррекция мягкого железа
Отложения мягкого железа влияют на магнитное поле, искажая и растягивая магнитное поле, и для компенсации этого использовалась та же процедура калибровки, но на основе производных значений магнитометров с компенсацией наклона x и y , потому что мягкое железо влияет только на направление, а чем напряженность поля. Если есть отложения мягкого железа, нанесение калибровочных циклов на двухмерную плоскость показало, что круг должен быть искажен в виде эллипса.Основа коррекции мягкого железа заключалась в определении малой и большой осей эллипса, соответствующих длинному и короткому размерам, соответственно. Эти значения определяли систему координат для эллипса, который был повернут на угловое смещение малой и большой осей, чтобы преобразовать их в глобальную систему координат и в круг. Эта процедура подробно описана в техническом отчете Memsense и выводит каналы магнитометра с поправкой на мягкое железо, определяемые как: mxs, mys и mzs.
Происхождение заголовка
Курс компаса ( H ) был определен с использованием осей x и y компонентов магнитометра из твердого и мягкого железа с поправкой на наклон.Арктангенс применялся к показаниям mxs и mys для определения курса относительно магнитного севера. Добавление или вычитание угла склонения приводило к получению направления относительно географического севера. H = atan2my, −mx • 180π. Определение направления головы также страдает неточностями из-за несовершенного размещения HIPOP на голове пользователя. Это было исправлено способом, аналогичным тому, который использовался для корректировки угла наклона головы: участникам предлагалось в определенном месте (снаружи — для устранения любых паразитных магнитных полей, вызванных зданиями) фиксироваться на трех объектах с известными направлениями и исправлять полученный по HIPOP курс значения соответственно.
Тесты на участников
Мы провели два типа тестов: один был проведен на удобной выборке из 15 участников, 8 из которых были женщинами и 7 мужчинами (средний возраст = 28 лет), чтобы изучить общую работу и валидность системы в Университете Суонси и вокруг него. Второе испытание было проведено с участием 27 участников в возрасте от 18 до 60 лет в зеленой открытой местности в Национальном ботаническом саду Уэльса (51 ° 50′23,46 ″ с.ш., 4 ° 9′4,74 ″ з.д.), расположенном недалеко от Лланартни, Южный Уэльс.Средний возраст этой группы составил 44,6 года с использованием 10-летних интервалов расчетного возраста (SD = 13,5). Из этих участников 19 мужчин и 8 женщин. Все процедуры были одобрены Комитетом по этике биологических наук Университета Суонси (BH-001-2014). Все участники дали письменное согласие. От участников не требовалось никаких конкретных характеристик, хотя у всех было нормальное зрение или зрение с поправкой на нормальное. Все участники предоставили некоторую информацию о себе, включая возраст и пол. Впоследствии они были оснащены HIPOP, установленным в L-образный корпус, чтобы обеспечить легкое и беспрепятственное использование этих устройств, прикрепленных к задней части головного убора (рис.2). Предлагаемый головной убор — кепка или повязка на голову.
Определение погрешности наклона головы при калибровках
Каждого участника, оснащенного HIPOP, попросили зафиксировать точку на стене на расстоянии 1 м от глаз, точно на уровне глаз. Затем испытуемого попросили зафиксировать на короткий период времени на двух других точках, на 1 м непосредственно выше и на 1 м непосредственно под первой точкой, сохраняя при этом то же положение. Впоследствии данные по импульсному ускорению (см. Рис.2), зарегистрированные HIPOP, были сглажены в течение 2 с (см. Выше) для получения значения импульсного ускорения, соответствующего наклону головки в этих трех положениях наклона головы, которое должно было соответствовать -45 °, 0 ° и 45 ° (при условии, что глаза остаются неподвижными в глазницах — см. ниже). Оценка фактического угла наклона HIPOP затем может быть преобразована в угол наклона головы простой линейной регрессией углов наклона устройства с известным углом наклона головы и корректировкой углов устройства для соответствия.Качество подгонки указывало на различия в этой процедуре. Было проведено несколько испытаний, в которых участников просили сосредоточиться на трех точках с разными интервалами, чтобы мы могли оценить эту изменчивость.
Эту процедуру повторили с теми же участниками, но попросили их надеть очки, которые сужали их зрение, позволяя им смотреть только через горизонтальную щель шириной 2 мм, расположенную точно горизонтально перед их зрачками. Ожидалось, что эта процедура уменьшит вариабельность процедуры калибровки шага.
Получение производной ориентации головы при нормальном внешнем поведении
Участников снабдили HIPOP, откалиброванными по высоте и направлению (см. Выше), и попросили передвигаться в университетском четырехугольнике размером примерно 36 × 46 м, в котором не было людей. Здесь их попросили зафиксировать определенные точки интереса (листы бумаги формата А4 с большими числами на них, размещенные вокруг квадроцикла на разных расстояниях (от 6,8 до 36 м), курсах (5–352 °) и возвышениях (-14 °). до наклона 58 °)), чтобы определить общие ошибки и отклонения «ориентации головы».Испытуемым было разрешено перемещаться по четырехугольнику, а затем их периодически просили встать на определенные точки на земле, отмеченные мелом, после чего их проинструктировали зафиксировать на 9 различных карточках вокруг квадранта в течение определенных периодов времени от 1 до 10 секунд. С помощью Leica Vector 21 (Vectronix, Швейцария) были определены реальные углы тангажа и направления от определенных точек на земле, от соответствующей высоты глаз до маркеров, чтобы можно было сравнить полученные углы головы и прямые углы.
Получение общих моделей движения головы при нормальном движении
После калибровки (см. Выше) участников попросили пройтись в разных условиях, чтобы получить предварительные данные о движениях головы в различных условиях. Среды были; (i) белый коридор, лишенный каких-либо черт, за исключением дверей без опознавательных знаков, ведущих в соседние комнаты (ii) снаружи в зеленой среде и (iii) снаружи, но в университетской среде (Университет Суонси).
Результаты
Общие системные тесты
Ошибка наклона головы
Процедура калибровки, в которой не использовался механизм ограничения зрения путем ограничения движения глаз в пределах глазных орбит с помощью очков, показала, что движение головы хорошо учитывает направление фиксации зрения с точки зрения наклона головы, со стандартными отклонениями для разных субъектов, варьирующимися от минимум 2.6 ° и максимум 12,4 ° (общее среднее SD = 6,4 °). Однако использование очков для ограничения движения глаз значительно уменьшило разброс, чтобы получить минимальные и максимальные индивидуальные стандартные отклонения в диапазоне от 0,7 ° до 8,7 ° (общее среднее SD = 2,8 °), и, таким образом, значительно лучше оценить направленность головы.
Общая ошибка
Тесты в университетском квадроцикле показали, что истинный угол тангажа близко соответствует углу, полученному с помощью HIPOP, причем наилучшее совпадение представляет собой линейную регрессию (рис.3A — среднее значение r 2 для участников = 0,88, диапазон 0,78–0,93, стандартное отклонение 0,045), с аналогичной дисперсией для истинного угла курса и угла курса, полученного с помощью HIPOP (рис. 3B — среднее значение r 2 = 0,98, диапазон 0,95–0,99, SD 0,012).
Рисунок 3: Угол наклона головы (A — шаг и B — направление), полученный из HIPOP, установленного на голове, по отношению к соответствующим углам прямой видимости с использованием данных участников (людей, обозначенных разными символами), которых попросили посмотреть на определенные цели в университете четырехугольник (подробности см. в тексте).
Предварительные наблюдения за закономерностями движения головы
Данные, полученные от участников, идущих по безликому коридору, продемонстрировали стилизованное движение в наклоне головы испытуемого даже при минимальных данных об окружающей среде. Обычно высота звука головы формировала волновое движение с длиной волны около 0,3 Гц, хотя между людьми были заметные различия (рис. 4). Примечательно, что в этой задаче участники работали в индивидуально определенных диапазонах (рис.5A), с гораздо большим межличностным изменением, чем внутри индивидуального (рис. 5B), и что это предположение также выполняется для скорости изменения угла наклона головы (рис. 6).
Рис. 4: Угол наклона головы четырех разных субъектов (линии разного цвета), идущих по неотмеченному коридору.
Обратите внимание на небольшие колебания в верхнем следе из-за отдельных шагов.Рисунок 5: Частотное распределение угла наклона головы у (A) четырех разных субъектов и (B) одного и того же субъекта (субъект W), выполняющих задание четыре раза, идущих по коридору без обозначений.
Графики показывают заметные межпредметные вариации и минимальные внутрипредметные вариации.Рисунок 6: Частотное распределение скорости изменения угла наклона головы у (A) четырех разных субъектов (таких же, как на рис. 5 — обозначено буквами) и (B) одного и того же субъекта (субъект W), выполняющего задание четыре раза, идя вниз безымянный коридор.
Как и на рис. 5, графики показывают заметные межсубъектные вариации и минимальные внутрисубъектные вариации.Испытания на открытом воздухе
Данные, собранные у людей, свободно перемещающихся на улице, показали, что участники тратили в среднем почти три часа ( x = 2.95 ч, SD = 0,83, n = 27) в саду, за это время они посетили многие из основных экспонатов. Однако некоторые участники фактически сняли свои шляпы (которые можно было легко отличить по сигналам наклона головы и направления), отображая последующие значения угла наклона головы и направления после этого без калибровки. По этой причине следующие данные относятся только к первым 30 минутам после того, как участники вошли в сад, и к периоду, когда корректировка шляпы не была очевидной. Представленная информация предназначена для иллюстрации того типа данных, которые можно ожидать при использовании системы на открытом воздухе, а не в качестве исчерпывающего трактата.
Шаг головы и товарная позиция
Как и участники в помещении, участники ботанического сада снаружи демонстрировали поведение движения головы, которое характеризовалось постоянным движением в плоскости поля. Когда он представлен временным графиком шага против , наклон головы обычно показывает волны различной амплитуды и длины волны (фиг. 7A). Напор аналогичным образом характеризовался постоянными колебаниями, а также различной амплитудой и длиной волны (рис.7B), хотя волны были заметно менее симметричными и менее гладкими, чем волны в шаговом измерении (см. Рис. 7A). Взаимодействие шага напора и напора во времени показано на рис. 7C.
Рисунок 7: Пример 30-секундного периода, показывающего направление движения головы (A) шаг (B) направление и (C) шаг и направление, объединенные на трехмерном графике, для посетителя, идущего через зеленую зону (Национальный ботанический сад Уэльса) .
Обратите внимание на характерные колебания высоты тона от 12 до 25 с (ср.Рис.4).В целом, диапазон угла наклона головы был обширным со значениями от -80 до 60 ° для всех участников, у большинства людей угол наклона превышал 100 ° (рис. 8), хотя 25% доверительный интервал был ограничен примерно до 25% (таблица 1). Общая картина заключалась в том, что люди, как правило, склоняли голову вниз, при этом средний угол наклона головы участников находился в диапазоне от -43 ° до 0 ° (эквивалентные режимы были от -63 ° до 14 ° и медианы от -39 ° до 4 °). Источник этого заметного изменения очевиден на частотных графиках шага головы вниз, которые обычно показывают мономодальное распределение с заметным перекосом в сторону отношения высоты тона головы вниз (значения асимметрии находятся в диапазоне от -1.3 и −0,1) (рис.9).
Рисунок 8: График угла наклона головы различных посетителей (обозначенных буквами алфавита) Национального ботанического сада Уэльса в течение первых 30 минут после входа на выставку.
Центральные точки показывают средние значения, прямоугольники — 25% доверительные интервалы и вертикальные полосы — 95% доверительные границы.Рисунок 9: Гистограмма частотных наклонов головы участников из примера, идущего по Национальному ботаническому саду Уэльса в течение первых 30 минут после входа.
Таблица 1:Примеры показателей, которые могут быть получены из HIPOP.
| Метрическая система | Блок |
|---|---|
| Мгновенный угол наклона головки | ° |
| Скорость изменения угла наклона головки | ° / с |
| Распределение угла наклона головки | ° |
| Амплитуда угла наклона головы | ° |
| Продолжительность цикла угла наклона головки | с |
| Угол фиксации шага головки | ° |
| Продолжительность фиксации шага головы | с |
| Мгновенный напор | ° |
| Скорость изменения головного угла | ° / с |
| Амплитуда цикла угла курса | ° |
| Продолжительность цикла угла заголовка | с |
| Угол фиксации заголовка | ° |
Средняя скорость изменения наклона головы варьировалась от -0,00187 ° / 0,1 с до 0,00187 ° / 0,1 с (этот короткий интервал времени был выбран для фактических значений, чтобы минимизировать вероятность изменения направленности головы во время сакуляции), хотя это было скорее отражение стабильности шага головы, чем выражение максимальной скорости изменения шага головы. Скорость изменения высоты тона головы иллюстрируется частотными распределениями, которые были симметричными и мономодально распределенными (рис.10).
Рисунок 10: Гистограммы частот, показывающие скорость изменения наклона головы участников (черный) и рыскания головы (серый) в течение первых 30 минут при входе в Национальный ботанический сад Уэльса (участники обозначены буквами алфавита).
Неудивительно, что значения курса различались шире, чем угол наклона головы, поскольку они охватывали все 360 °. В течение рассматриваемого периода участники демонстрировали заметную изменчивость заголовков (рис. 11), причем большинство участников имели явно ненормальное распределение.
Рисунок 11: Частотная гистограмма направления движения (направление относительно севера = 0 °) от участников из примера, идущих через Национальный ботанический сад Уэльса в течение первых 30 минут после входа, когда они шли примерно в северо-восточном направлении (прибл. 45 °).
Средняя скорость изменения курса составляла от -0,3141 до 0,01263 ° / 0,1 с. Как и в случае с питчем головы, частотные распределения были симметричными и мономодально распределенными (рис.9).
Взаимодействие угла наклона головы и направления головы показало значительные различия в маршрутах, выбранных участниками в зеленых насаждениях ботанических садов, и подчеркнуло роль, которую ориентация головы, как ожидается, может играть в знакомстве людей с определенными особенностями окружающей среды (рис. . 12).
Рис. 12: Визуализация траектории посетителя Национального ботанического сада Уэльса (красные линии — определены с помощью GPS) с заголовком, представленным в виде линий, отходящих от траектории.
(A) показывает вариации в зависимости от местности, а (B) подчеркивает изменения угла наклона головы, происходящие в процессе ходьбы (наклон вниз — более темные цвета, наклон вверх — более светлые).Обсуждение
Позиция головы и ее роль в восприятии окружающей среды
Положение головы — это один из трех подвижных элементов, которые определяют, какая часть окружающей среды может попасть в виде изображения на сетчатку глаза. После ориентации тела, которая может охватывать до 360 ° как тангажа, так и курса, положение головы имеет дугу движения почти 180 ° по отношению к положению тела (рис.13). Однако важно отметить, что измерение положения головы, как это сделано здесь с использованием HIPOP, дает информацию о потенциальном поле зрения сетчатки глаза, которое мы называем «средой». С любой конкретной средой, определяемой положением головы. , шесть мышц, управляющих движением глаз человека (Kolb, Fernandez & Nelson, 2007), позволяют глазам сканировать этот кадр как по горизонтали, так и по вертикали. Таким образом, после определения окружающего кадра головой, пределы движения глаз в их глазницах дают диапазон возможных положений взгляда (ок.f. Шталь, 1999). Хотя движение головы и глаз тесно скоординировано (Morasso, Bizzi & Dichgans, 1973), подразумевая, что положение головы может указывать на положение взгляда (см. Рис. 3), потенциальные ошибки делают использование положения головы гораздо более сложным. более слабый индикатор направления взгляда, чем, например, айтрекеры (Spooner, Sakala & Baloh, 1980). Тем не менее, поскольку положение головы образует среду для глаз в пределах определенного конуса, его количественная оценка позволяет предположить, что она может оказаться показательной в отношении того, как мы сканируем окружающую среду в целом, а также характеристик, которые влияют на то, как мы сканируем окружающую среду. окружающая обстановка.
Рис. 13: Иерархия вращающихся и невращающихся элементов, которые определяют абсолютную ориентацию головы, и, помимо этого, элементы, которые определяют, падает ли объект в поле зрения, обеспечиваемом ориентацией головы, на ямку.
Количественная оценка отношения головы и поведения, которое, как ожидается, будет определять среду обитания
Это неисчерпывающее исследование ясно показывает, что движение головы человека, зарегистрированное представленной здесь системой HIPOP на основе акселерометра-магнитометра, может быть эффективно определено количественно (хотя только если испытуемые не снимают свои устройства).Такие данные могут использоваться на двух уровнях; (i) в качестве показателей поведения с использованием таких показателей, как угол наклона головы и направление движения во времени (рис. 7) и (ii) в качестве индикатора характеристик, которым люди подвергают свою зрительную систему.
Ожидается, что индексы поведения, проявляющиеся в движении головы, будут зависеть от набора переменных, зависящих от участников, таких как пол (см. Farenc, Rougier & Berger, 2003), возраст (см. Kauffman, 1987), социальный статус (см. Cashdan, 1998), и даже состояние (ок.f. Riskind & Gotay, 1982), а также на окружающую среду вокруг участника.
В целом, однако, направление головы, вероятно, предоставит полезную информацию о том, как люди реагируют и позиционируют ландшафт относительно своего поля зрения: другими словами, голова должна быть ориентирована определенным образом, чтобы объекты в окружающей среде могли быть заметным с учетом ограничений движения глаз внутри глазниц. Например, в отношении других животных был проведен значительный объем работы, связанной с бдительностью (например,г., Чайлдресс и Лунг, 2003; Даймонд и Лазарус, 1974; Lima & Bednekoff, 1999), где животные осматривают ландшафт на предмет признаков хищников, и это поведение было получено по движению головы (Treves, 2000). Несмотря на то, что такая работа не выражается количественно с точки зрения специфики, такой как показатели, которые может предоставить HIPOP, такая работа показывает важность изучения ландшафта у животных, и даже вероятно, что это произойдет в общем смысле у людей, хотя, возможно, не связано конкретно с хищники (хотя моторизованные транспортные средства могут считаться достаточно опасными по качеству для этого).
Если ориентация головы, полученная из HIPOP, рассматривается в этом контексте, мы можем исследовать значение движений головы в целом, особенно в качестве дополнения к технологиям сканирования глаз (см. Guitton & Volle, 1987).
Общее экологическое обрамление
Ожидается, что обычное ландшафтное сканирование примет форму очень широкой дуги, возможно, охватывающей все 360 ° при медленной скорости изменения курса. Поскольку люди склонны больше сканировать в незнакомой обстановке (Mourant & Rockwell, 1970), можно ожидать, что процентный вклад такого времени сканирования головы будет соответственно меняться, но также ожидается, что способы этого будут зависеть от скорости движения (Hirasaki et al., 1999). Однако общее окружение может иметь определенный контекст, например, для навигации, облегчения движения или внимания к конкретным элементам окружающей среды, а характер функции будет определять ожидаемые закономерности в ориентации головы.
Экологическое обрамление для навигации
Часть оценки окружающей среды движущимися людьми будет конкретно связана с навигацией, и, поскольку навигация человека происходит от зрения, и, в частности, соотнесение положения наблюдателя с ориентирами (см.Colin de Verdière & Crowley, 2000), можно ожидать, что движение головы будет отображать определенные закономерности, связанные с этим. Конечно, для систем слежения за глазами (Robinson & Taboada, 1994) ожидается, что ориентиры будут считаться достопримечательностями в течение некоторого периода (см. Becker & Fuchs, 1969), хотя можно ли это просто преобразовать в соответствующее движение головы с учетом движение глаз в глазницах как мешающий фактор необходимо будет тщательно изучить.
Предполагаемые движения головы при традиционной навигации могут быть дополнительно изменены с помощью мобильных телефонов, планшетов или карт, которые, как известно, заметно изменяют поведение при навигации (Ishikawa et al., 2008). Здесь можно ожидать, что движение головы покажет усиление экстремального наклонения головы, когда люди обращаются к своему источнику информации.
Экологическое обрамление для информирования движения
Вероятно, важным элементом движения головы будет осмотр местности на предмет эффективного движения, при этом люди смотрят вниз, чтобы убедиться в устойчивости. Мы ожидаем, что там, где это происходит, наклон головы будет тесно коррелировать с направлением движения, потому что люди будут смотреть туда, куда они идут.Определить это поведение не удалось окончательно в рамках данного исследования из-за точности позиционных данных от GPS. Однако тщательно организованный протокол, включающий систему счисления мертвых точек с поддержкой GPS (Wilson, Shepard & Liebsch, 2008) с надлежащими показателями скорости движения, полученными из значений акселерометрии (Bidder, Qasem & Wilson, 2012; Bidder et al., 2012) ), должен показать, как люди ориентируют голову, чтобы наклониться, как часть нормального процесса безопасного передвижения в окружающей среде.В частности, следует ожидать, что направление головы должно быть тесно связано с направлением движения тела, что эта корреляция будет наиболее тесной на больших скоростях (Land, 2004) и что голова будет наклоняться вниз сильнее по мере того, как местность становится более сложной. Кроме того, этот осмотр местности на предмет эффективного движения, вероятно, будет меняться с возрастом, при этом у пожилых людей, возможно, будет более отрицательный угол наклона головы для данной среды, что, как ожидается, будет связано с их обычно более слабым зрением (см.Bressler, 1989) и нестабильность (Sadeghi et al., 2004). Наконец, интенсивность света, вероятно, повлияет на осмотр местности на предмет эффективного движения, при этом снижение уровня освещенности приведет к большей отрицательной высоте звука, поскольку люди более внимательно осматривают землю перед собой в неоптимальных условиях освещения.
Наконец, при посещении ботанического сада и, возможно, в качестве нормальной части человеческого поведения, следует ожидать, что значения положения головы должны отражать интерес участника к определенным особенностям, таким как указатели, цветы, статуи и водоемы. .Ожидается, что различный характер таких точек приведет к соответственно различным значениям угла наклона головы и рыскания, но есть некоторые обобщения, которые можно сделать. Во-первых, если такой осмотр проводится, когда наблюдатель неподвижен, то ожидается, что частотные распределения результирующих значений тангажа и рыскания будут иметь форму пиков, причем ширина распределений, возможно, будет меняться в зависимости от размера и расстояния до объекта. проверено (ожидается более плотное распределение с более удаленными и меньшими объектами).Однако, если осмотр проводится во время движения наблюдателя, то расстояние между наблюдателем и интересующим объектом будет критически влиять на частотное распределение рыскания головы, потому что голова должна иметь более высокую угловую скорость в плоскости рыскания для более близких объектов.
Движение головы при межличностном взаимодействии
Положение и движение головы также используются в общении, например, для формирования аффекта (Tom et al., 1991) и в качестве помощи в восприятии речи (Munhall et al., 2004), включая кивание и покачивание головой, чтобы выразить согласие или несогласие (см. Briñol & Petty, 2003). Кроме того, обширная работа по вербальному и невербальному общению показывает, что люди, общающиеся друг с другом, обычно смотрят друг на друга (Ekman & Rosenberg, 1997) и склонны наклонять голову, чтобы поддерживать зрительный контакт (см. Kleinke, 1986). Таким образом, помимо того, что общение время от времени является заметным компонентом поведения, связанного с движением головы, можно ожидать, что высокие люди будут склонны к наклону вниз, в то время как у более низких людей отношение к наклону вверх.Такие модели еще больше усложняются направленностью взгляда в соответствии с содержанием разговора (Adams Jr & Kleck, 2005).
Положение головы в контексте, не связанном с фреймами
Кроме того, направление головы не всегда должно иметь прямое отношение к окружающей среде, что наиболее очевидно, когда люди закрывают глаза, например, во сне, во время самоанализа или «мечтаний» (см. Antrobus, Antrobus & Singer, 1964).
Использование HIPOP в качестве индикатора того, на что смотрят люди, является более сложной задачей, потому что жизнеспособность системы зависит от точности определения местоположения пользователя и расстояния между ним и интересующими объектами.Точность (без дифференциальной коррекции) GPS-позиционирования составляет порядка нескольких метров (Dussault et al., 1999), поэтому этого разрешения явно недостаточно, если объекты, представляющие визуальный интерес, должны определяться на коротких расстояниях. Однако они могут попасть в зону видимости, если это расстояние достаточно велико. Потенциальным решением этой проблемы является определение местоположения с использованием комбинации GPS-координат и точного счисления (Wilson, Shepard & Liebsch, 2008), в результате чего ошибки в обеих системах могут использоваться для исправления друг друга, хотя для этого требуется, чтобы владельцы HIPOP также носили соответствующие устройств.Примечательно, однако, что точный расчет с использованием GPS вряд ли будет жизнеспособным для объектов в зданиях и, в любом случае, для использования стали в строительстве (а также преобладания единиц, создающих магнитное поле в зданиях, таких как электропроводка и компьютеры) вызовут ошибки в расчете курса из-за искажения магнитного поля Земли. В противном случае угловая протяженность конуса обзора будет основным фактором, определяющим системную ошибку для определения интересующих объектов, причем эта ошибка увеличивается с увеличением расстояния между субъектом и объектом в соответствии с простыми тригонометрическими правилами.Таким образом, для конуса обзора около 9 ° диаметр круга обзора будет составлять 0,16 м на расстоянии между субъектом и объектом 1 м, 1,6 м на 10 м и 31,5 м на 200 м. Эта ситуация, вероятно, будет еще более усложнена, если время нахождения глаза короткое, что может привести к увеличению конусов ошибки линии визирования.
Общая гибкость HIPOP, который основан на устройстве, используемом для слежения за дикими животными (Wilson, Shepard & Liebsch, 2008), также означает, что он может быть ценным при изучении движений человека и степени, в которой модели движений связаны с тем, как люди ориентируют голову, чтобы воспринимать окружающую среду (что проявляется в показателях движения головы HIPOP).Короче говоря, HIPOP, похоже, поддается исследованиям, направленным на количественную оценку как того, как люди информируют себя об окружающей среде, так и того, как они реагируют на то, что видят.
Производные показатели
HIPOP имеет потенциал для создания набора интересных показателей, которые могут оказаться полезными для определения того, как люди информируют себя об окружающей среде, что мы в целом классифицируем как «информирующее поведение». Метрики, описывающие то, как люди воспринимают окружающую среду, были предложены для отслеживания взгляда. изучает и включает меры, основанные на параметрах, связанных с фиксацией, саккадами, путями сканирования и взглядами (Ehmke & Wilson, 2007), и включают «длительные фиксации», «путь сканирования» и «саккады обратного хода» ( Ehmke & Wilson, 2007).Неисчерпывающий список показателей, которые могут быть рассчитаны на основе данных HIPOP по кадрированию окружающей среды, представлен в таблице 1, в которой показано относительно большое количество вариантов, которые демонстрируют значительное разнообразие и, возможно, сопоставимы с исследованиями отслеживания взгляда, даже если особенности взгляда направление не дано. Помимо очевидных показателей ориентации головы, сравнимых, хотя и не эквивалентных, с показателями, полученными из исследований отслеживания взгляда, таких как время пребывания глаза (Galesic et al., 2008) и скорость фиксации глаза (Russo & Rosen, 1975), мы предлагаем что данные, полученные с помощью HIPOP, могут быть использованы для изучения того, существуют ли определенные закономерности в том, как люди формируют среду.Примером этого являются очень четкие формы волн, видимые в наклонах головы у испытуемых, идущих по практически безликому коридору (рис. 4). Хотя выделение различий в показателях в зависимости от предмета или условий окружающей среды выходит за рамки данной работы, мы отметили существенные различия в поведении между участниками, перемещающимися в безликом коридоре и за его пределами, что предполагает, что изучение « информативного поведения » будет захватывающий путь для будущих исследований.
Возможные области применения
Вывод из этого исследования состоит в том, что HIPOP имеет ряд полезных для общества приложений, а также играет роль в информировании науки о голубом небе. Например, могут быть практические применения, связанные с изучением людей с дефицитом поля зрения, примерами которых являются туннельное зрение (Peli et al., 2007), глаукома (Bramley et al., 2008) или скотомы (Schuchard, 2005). . Ожидается, что эти условия будут приводить к очень разному поведению головы (хотя работа должна установить это), так что, например, прогрессирование протоколов реабилитации (например,g., Gieser et al., 2006) можно оценить с помощью HIPOP для количественной оценки сопутствующих изменений в том, как образуется среда.
В непатологическом контексте HIPOP может информировать нас о том, как люди формируют свое окружение в соответствии с ростом, полом, этнической принадлежностью или возрастом, позволяя направлять маркетинговые усилия на эти сайты. Это обеспечит ценный механизм обратной связи для уличных экспонатов, таких как зоопарки или ботанические сады. Также должна быть возможность изучить, какие особенности в окружающей среде (цвет, размер и т. Д.)), скорее всего, привлекут внимание, уводя людей от их обычных директив сканирования (см. рис. 4A), что также может быть важно с точки зрения маркетинга.
Более фундаментальный, однако, способ, которым люди формируют окружающую среду, критически важен для инициатив, направленных на информирование представителей общественности в целом, таких как вывески в городах. Было бы очень важно, если бы мы обнаружили, например, что пожилые люди, как правило, смотрят вниз (имеют отрицательный угол наклона головы) и, таким образом, плохо осведомлены о городских вывесках.Мы отмечаем, что многие исследования предполагают влияние возраста как на поворот головы, так и на походку (Isler, Parsonson & Hansson, 1997; Lockhart, Woldstad & Smith, 2003), а также актуальность снижения зрения у пожилых людей (Wormald et al., 1992). Подобные аспекты могут помочь объяснить использование пространства отдельными слоями населения. Это аналогично исследованию поведения участников дорожного движения (водителей, велосипедистов и пешеходов), где исследования, способные определить, где люди меньше всего выглядят (и, следовательно, наиболее подвержены авариям), необходимы, особенно сейчас, когда технологии несут ответственность за большие отвлекающие факторы. дорога (Nasar, Hecht & Wener, 2008).
Сейчас, когда человеческий мир меняется быстрее, чем когда-либо в прошлом, тема того, как мы информируем себя, становится все более актуальной. Наши очень предварительные исследования показывают, что головные системы, подобные нашей, могут предоставить нам новый полезный инструмент, с помощью которого можно изучить последствия этого и дать нам представление о том, как смягчить эти вредные элементы.
Leave a Comment