Наброски позы человека: Ошибка | artlab.club
15.06.2021 


 Разное
Разное
Как рисовать наброски поз
Иногда кажется, что чем больше даёшь объяснений о том, как делать наброски поз, тем более хаотичной становится практическая часть. Выразительность в расстановке контрольных точек, важность мнения художника, рассказ истории посредством позы, преувеличение в позе и это не говоря ещё о миллионах других подходов, что даёт ответ на вопрос, как рисовать наброски поз совсем обескураживающими.
Несмотря на то, что все вышеуказанные мною подходы и методы важны, лично я всегда сначала сосредотачивался (особенно когда преподаю) на необходимых практических механиках. Как только вы их освоите, то потом уже можно их подгонять под себя или вовсе полностью отказаться от них в погоне за личным стилем. В этом духе (и после того, как я понял, что это было большим моим упущением не осветить эту тему в моей книге) я прикладываю краткий пошаговый процесс для рисования наброска позы, а также свои заметки, чтобы описанное было более понятным. Посмотрите на примеры и на список, и попробуйте.
Пошаговый список
1. Начните с круга обозначающего голову.
2. Изобразите ассиметричные движения позвоночника в 3-4 линии. Линии должны непринуждённо представлять 1 — шейный отдел, 2 – отдел грудной клетки, 3 — воображаемую линию пресса, 4 – поясничный отдел.
3. От линии поясницы, создайте кривую для бедра со стороны которая держит вес.
4. Обозначьте положение ног в 3 линии – 1 линия чтобы показать бедренную кость, 1 для колена и 1 для голени. Ногу также можно нарисовать в 1 или 2 линии, в зависимости от желаемой степени упрощённости.
5. Обозначьте поддерживающую ногу по тем же принципам. Совет – иногда я оставляю поддерживающую ногу более простой (в 1 или 2 линии) по отношению к той, что держит вес, для более расслабленного вида.
 От плеча нарисуйте 2 линии: 1 для плечевой кости и 1 для предплечья (эта линия также может переходить в направление руки или другой линии, добавленной к руке)
От плеча нарисуйте 2 линии: 1 для плечевой кости и 1 для предплечья (эта линия также может переходить в направление руки или другой линии, добавленной к руке)Этот подход основан на технике Глена Вилппу. Если у вас есть возможность, то советую записаться на его курсы или хотя бы прочитать его «Мануал»
Создаем динамические позы при помощи жестового наброска
Персонажи выглядят застывшими? В ваших иллюстрациях повторяются одни и те же позы? Анимация выглядит скучной? Не волнуйтесь, у меня есть решение! Динамический жестовый набросок – это прекрасное упражнение, которое поможет сделать вашу работу интересной, и самое главное – веселой!
Что вам понадобится
- Фото-референсы, например с PhotoDune: группа подпрыгнувших ребят
- Фильмы или ТВ-шоу
- Ваша любимая программа или материалы – я рекомендую недорогие фломастеры и копировальную бумагу
- Секундомер
Дополнительно:
- Занятия по рисунку с натуры (ищите объявления в местной прессе или художественных школах)
- Согласный на все друг
Что такое жестовый набросок и почему он так важен?
Согласно Википедии:
«Жестовый набросок – это рисунок, который создается за очень короткое время.
Типичные ситуации применения: художник зарисовывает серию поз, которые принимает модель на короткие промежутки времени…»
Этот навык нужно развивать, потому что вы очень быстро научитесь фиксировать движение. Затем это поможет вам при создании интересных и динамических сюжетов. Жестовый набросок на самом деле может помочь вам зафиксировать даже неуловимые действия: показать что кто-то кого-то любит или изумительные динамические позы, которые вы можете увидеть на матче по реслингу, и которые прекрасно подойдут для вашего комикса о супергерое!
Жестовый набросок не всегда должен содержать захватывающие, взрывные позы как на картинке с PhotoDune.
Жестовый набросок позволяет поймать ритм, движение и сам процесс. Даже статичные позы могут выглядеть динамично. Помните, что это не застывшие фигуры, а люди в движении.
Линия действия
Линия действия очень важна, и она не всегда является позвоночником человека или существа. Это форма, которую принимает объект. Именно с нее начинается жестовый набросок. Внимательно посмотрите на объект и зарисовывайте линию действия столько раз, сколько потребуется. Вот пример линий движения тех пяти ребят.
Именно с нее начинается жестовый набросок. Внимательно посмотрите на объект и зарисовывайте линию действия столько раз, сколько потребуется. Вот пример линий движения тех пяти ребят.
Опираясь на эти линии действия, вы сможете набросать конечности, торс и голову. Пусть линии будут плавными. Даже угловатые линии ног центрального персонажа плавные. Помните, однако, что мягкие гладкие линии могут показать спокойствие и гибкость, тогда как острые углы покажут напряженность.
Как работаю я
Я начинаю с линии движения и затем разбиваю на части ноги. Быстрый темп работы помогает мне зафиксировать движение. Работая на занятиях по рисованию с натуры, я тренировался рисовать позы за короткое время: от 30 секунд до 2 минут. Зафиксируйте в наброске как можно больше информации.
Практика
Правильная поза не всегда получается с первого раза, но это и хорошо. Это упражнение и не предназначено для готовой работы.
Будьте небрежны, будьте быстры! Не забывайте пересматривать наброски, чтобы увидеть над чем еще стоит поработать, а что уже хорошо получается.
Если вы найдете динамическую позу, которая у вас хорошо получается, то попытайтесь доработать ее с точки зрения базовой анатомии. Это будет прекрасная тренировка.
Другой способ использовать жестовые наброски – это работать над сложными позами на занятиях по рисунку с натуры. Не уверены в том, как построить анатомию? Для начала нарисуйте несколько грубых набросков позы. Не нравится, как выглядит модель с твоего места? Прогуляйтесь вокруг нее и других студентов (тихонечко, конечно!) и набросайте позы с разных ракурсов, чтобы найти лучшую. Я — сторонница планирования перед началом работы. Это может показаться тратой времени, но позднее вы его сэкономите, когда будете работать над полноценным рисунком.
Будьте проще!
Начните с линии движения, а затем добавляйте любые формы. Иногда я использую форму фасолины для тела, а иногда использую прямоугольники и треугольники.
Чтобы показать направление поворота головы, нарисуйте овал с горизонтальной линией на месте глаз и вертикальной — на месте носа.
Как улучшить навык?
Вам поможет только практика, практика и еще раз практика!
Для этого хорошо подходят занятия по рисованию с натуры. Они не всегда доступны, но лучше них ничего нет. В художественном колледже я любила такие занятия – они проходили каждую пятницу. Это были и длительные зарисовки, направленные на изучение анатомии и 30-секундные наброски для изучения движения. При этом модель сменяла позу, часто использовалась опора или ткань. И вы никогда не знали заранее, какая поза будет следующей! К концу утренней сессии, которая длилась несколько часов, у меня были десятки и десятки скетчей. Это позволило мне очень быстро развить навык фиксации движения и жестов!
Самый веселый способ практики – это просмотр фильмов. Ставьте на паузу тот момент, в котором есть крутое движение и попытайтесь зафиксировать позу. Установите себе ограничение по времени (используйте секундомер).
У вас будет поездка или перерыв на обед и вы не имеете доступа к занятиям с натурой? Рисуйте все, что видите! Посмотрите в окно автобуса и постарайтесь зафиксировать позы идущих мимо людей. Это отличное упражнение, потому что вы не можете сесть и проанализировать позу, вернуться и перерисовать.
Это отличное упражнение, потому что вы не можете сесть и проанализировать позу, вернуться и перерисовать.
Найдите подходящие инструменты. Когда я работаю не в диджитале, мне нравится использовать маркеры. Они не должны быть дорогими – подойдут и детские фломастеры. Преимущество наличия нескольких цветов в том, что вы можете провести линию действия одним цветом, а зарисовать позу другим.
Жестовые наброски не обязательно рисовать с людей. У вас есть питомец? Живете рядом с фермой? Так примените свои навыки к коту Табби или корове Дэйзи.
Самое важное: будьте проще.
Помните, что вам не нужна идеальная анатомия в этом упражнении – вы просто фиксируете движение и плавность.
Заключение
Я надеюсь, вы получите удовольствие от создания таких набросков. Они несовершенны. Используйте самые дешевые материалы: копировальную бумагу или бумагу для принтера, фломастеры или уголь. Выполняйте это упражнение регулярно и используйте его в качестве разминки перед полноценным рисованием!
опыт Кристины Ортеги — Gamedev на DTF
Опытный моделер, тесно сотрудничающий с Голливудом, поделилась процессом создания персонажа.
3911 просмотров
Работа Кристины.Кристина Ортега — художник по персонажам в студии по визуальным эффектам Jellyfish Pictures. На примере пайплайна стилизованного персонажа «Мичи» по концепту Лайи Лопес она рассказывает, как можно использовать лучшие качества сразу нескольких 3D-программ.
Я замоделила волосы и тело девушки в ZBrush, а топологию отредактировала в Maya.
Затем задала позу персонажу в ZBrush и, поскольку хотела использовать простую текстуру, раскрасила Мичи там же с помощью Polypaint. Топ создала в Marvelous Designer, а обувь и джинсы в Maya. Arnold я использовала для освещения и рендеринга финальных изображений, и Photoshop для окончательного композитинга.
Кристина Ортега
Анализируем концепт и подбираем референсы
Прежде, чем приступать к скульптингу, нужно тщательно проанализировать 2D-концепт. В идеале — проработать персонажа с разных ракурсов и представить, как будут меняться его пропорции в зависимости от принятой позы.
В идеале — проработать персонажа с разных ракурсов и представить, как будут меняться его пропорции в зависимости от принятой позы.
Мне нравится прочерчивать примитивы прямо поверх концепта. В случае с Мичи это помогло в построении волос, так как их форма изменялась от скетча к скетчу. Я определила основные формы, которые помогут мне на этапе блокинга.
Анализ концепта.
Еще такой анализ позволяет понять, какие части персонажа потребуют дополнительных референсов. В концепте Мичи нет информации о положении рук или о том, как будет выглядеть задняя часть волос. Эти детали Кристине пришлось продумать самостоятельно.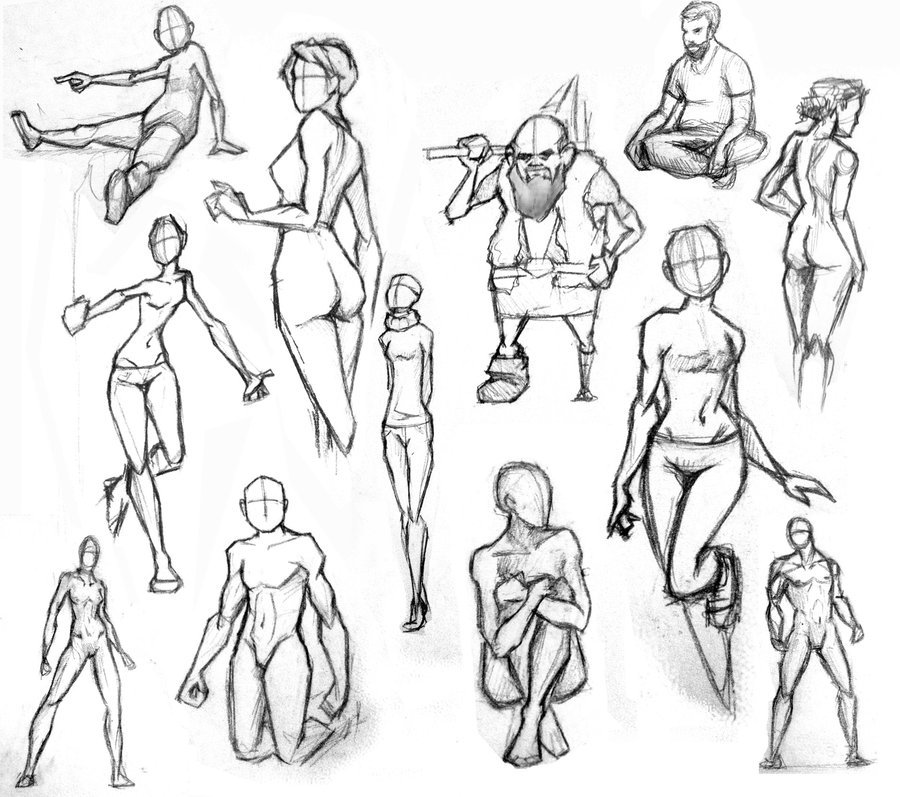 Очень важно в таких случаях найти правильные референсы. Не жалейте времени на их поиск, а для удобства разбейте рефы на группы.
Очень важно в таких случаях найти правильные референсы. Не жалейте времени на их поиск, а для удобства разбейте рефы на группы.
Скульптим тело и голову
Кристина Ортега создавала персонажа «для себя» в портфолио, поэтому лепила основу с нуля без использования base mesh — готовой модели. Часто 3D-художники пользуются готовыми ассетами, болванками, которые подготавливают самостоятельно или покупают. Начинающим моделерам мы рекомендуем тоже работать с нуля.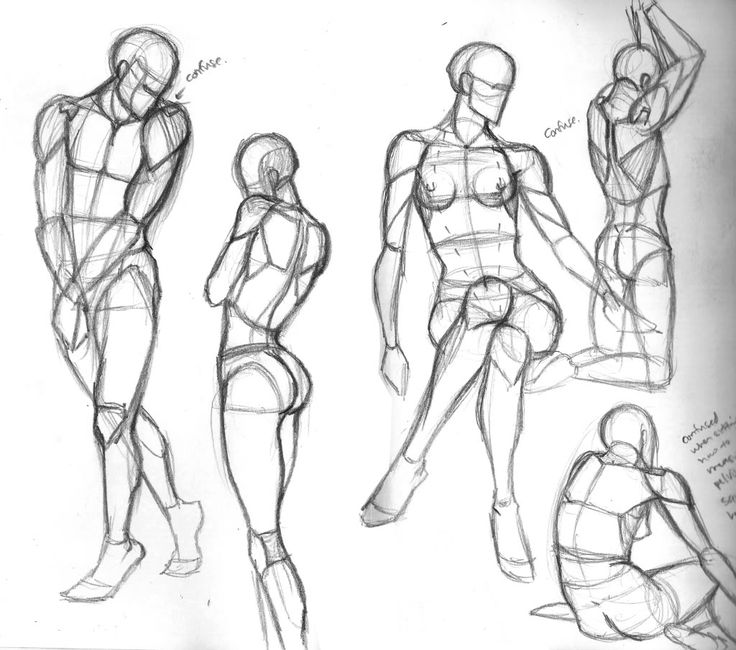 Это отличная тренировка навыков блокинга и анатомии в целом.
Это отличная тренировка навыков блокинга и анатомии в целом.
Я стараюсь как можно дольше не соединять все элементы фигуры воедино, чтобы можно было их редактировать, не беспокоясь о топологии [качестве сетки]. Всегда смотрите на модель с разных ракурсов, чтобы убедиться, что все смотрится красиво.
Как только базовая модель готова, можно объединить все элементы и подкорректировать анатомию.
Я скорректировала топологию в Maya и вернулась в ZBrush, чтобы отточить детали. Ногам я уделила меньше всего времени, потому что в обуви их не видно.

Голову персонажа художница смоделировала по тому же принципу, что и тело. В процессе лепки она использовала функцию Dynamesh, чтобы корректировать чистоту сетки. Когда голова была готова, она создала новую топологию в Maya с помощью инструмента QuadDraw, а для уточнения головы и лица вернулась в Zbrush.
На этом этапе я обычно начинаю добавлять цвета в ZBrush, потому что это помогает мне лучше понять, как будет выглядеть персонаж.
Привлекательность лица очень важна для персонажа, считает Кристина. Сделайте несколько вариантов, чтобы выбрать лучший. Оно должно сохранить суть концепции и стилизации.
Когда я леплю лицо, я думаю о личности персонажа.
Это определяет тип форм, которые я использую.
Волосы и одежда
Волосы лучше лепить не единым блоком, а с помощью комбинации примитивов. Каждый пучок передней части волос и челки Кристина проработала индивидуально. Это позволило привести каждый элемент к нужной форме, добавляя геометрии по мере необходимости. Сложные области художница редактировала в Maya, чтобы лучше контролировать пересечения друг с другом и редактировать топологию.
Сложности возникли с нижней частью волос. Сначала я попыталась смоделировать ее отдельными прядями, как волосы спереди. Но это выглядело очень сложно и плохо читалось.
Поэтому я упростила ее и создала в Maya сплошной объем, добавив немного прядей сверху.
Одежду Кристина создавала в Marvelous Designer с персонажем в Т-позе. Это оптимальное положение, так как в нем легче создавать ткань и быстро изменять ее. Когда топ готов, можно изменить позу с помощью функции Morph Target. Поскольку она полностью меняет позирование, складки на рукавах, которые возникают при движении рук назад и защемлении ткани между руками, получаются естественными. Помните, что одежда и персонаж должны иметь одинаковую топологию, чтобы блендиться [сочетаться] друг с другом.
Создание ткани в T-позе. Marvelous Designer.
Адаптируем одежду к позе из концепта:
В позе выше скорректирована длина топа и его оборки и уменьшено расстояние между частицами, чтобы получить максимальную правдоподобность ткани и избежать артефактов на поверхности объекта в Maya. Кристина также немного «надула» рукава, чтобы они были больше похожи на вид из концепта. После этого в Maya нужно снова создать топологию:
Кристина также немного «надула» рукава, чтобы они были больше похожи на вид из концепта. После этого в Maya нужно снова создать топологию:
В Marvelous я сделала UV-развертку топа. Затем экспортировала его в плоском виде в заданной позе. В Maya я сделала ретопологию этой плоской поверхности с помощью quad draw + live mode [режим для ретопологии]. Осталось только соединить части топа и создать швы, если они необходимы. С помощью этого метода вы также сохраняете идеальную UV-развертку, что очень полезно в дальнейшем для текстурирования.
Брюки Кристина моделировала сразу в Maya, так как они очень плотно прилегают к коже, а разрезы имеют сложную форму. Затем экспортировала их в ZBrush, чтобы уплотнить и сгладить сетку с помощью дополнительных сабдивов и добавить детали и складки.
Для нитей в разорванных частях джинсов Кристина использовала кисть CurveTube Brush. Последним шагом она изменила их равномерность и придала разную толщину.
Слева — кеды, полностью смоделированные в Maya. Справа — применение кисти CurveTube Brush для нитей в разрезах джинсов.
Выбор позы и финальный рендер
Позу персонажа Кристина задала с помощью Transpose Master в Zbrush, когда одежда была еще на ранней стадии моделирования, перед добавлением деталей. Это позволило избежать ненужных деформаций в геометрии.
Это позволило избежать ненужных деформаций в геометрии.
Я опиралась на позу из концепта, но применила к ней принципы контрапоста — это классический прием, который требует постановки бедер и плеч под противоположными углами, что дает небольшую S-образную форму всему туловищу. Это немного отличает Мичи от первоначальной идеи, зато делает позу более динамичной. Обычно я быстро прикидываю 2-3 разные позы, чтобы выбрать лучшую.
В заключение Кристина подправила силуэт волос и одежду, добавила лицу асимметрию, чтобы персонаж выглядел более правдоподобно. Поскольку художница хотела использовать простой шейдинг, она покрасила персонажа в ZBrush с помощью инструмента Poly Paint. После этого экспортировала карты в Maya.
Освещение и рендеринг Кристина выполняла с помощью плагина Arnold в Maya. В сцене она использовала четыре источника света: один с теплыми цветами — основной, другой с синими тонами — для краевого света, чтобы отделить персонажа от фона. Два дополнительных источника для подсветки, чтобы избавиться от темных участков.
Для рендеринга крупным планом я добавила эффект DOF (глубина резкости) в Arnold. Финальную композицию я собрала в Photoshop.
Небольшой совет напоследок от Кристины
При работе над новым персонажем всегда бывает момент, когда вы не видите прогресса или вам кажется, что работа не получается.
Мой совет: в этот момент идите отдыхать!
Выключите ненадолго компьютер и отвлекитесь, чтобы вернуться к модели свежим. Попробуйте сделать несколько дополнительных рисунков, чтобы выяснить, какой объем или часть концепта вы не можете понять. Размышления в 2D помогут увидеть персонажа с новой точки зрения.
Готовый рендер «Мичи».
Проверяйте профильные ресурсы каждый день: 3dtotal, Artstation и ZBrush Central. Там вы найдете вдохновение и почерпнете опыт других художников.
Когда могу, я захожу на канал Marvelous Designer в Discord, где люди делятся советами.
В Instagram я подписана на аккаунты программ, которые использую, чтобы быть в курсе новостей о новых функциях или выпусках. Я также слежу за художниками и скульпторами, занимающимися традиционным рисунком.
| 3D для 2D художника (8 занятий) | Вторник, Четверг | 3, 5, 10, 12, 17, 19, 24, 26 | 19:00 – 22:00 | Георгий Подшибякин | 16 000 | Учебный план |
| Цифровой рисунок (Основы Concept-Art) (8 занятий) | Понедельник, Среда | 2, 4, 9, 11, 16, 18, 23, 25 | 19:00 – 22:00 | Ольга Дребас | 16 000 | Учебный план |
Анатомические наброски для 3D Художников. Динамические позы Динамические позы(8 занятий) | Вторник, Четверг | 3, 5, 10, 12, 17, 19, 24, 26 | 19:00 – 22:00 | Кристина Гашко | 14 000 | Учебный план |
| Анатомическая скульптура для 3D Художников (8 занятий) | Понедельник, Среда | 2, 4, 9, 11, 16, 18, 23, 25 | 19:00 – 22:00 | Ольга Аранова | 16 000 | Учебный план |
| Анатомическая скульптура для 3D Художников (8 занятий) | Вторник, Четверг | 3, 5, 10, 12, 17, 19, 24, 26 | 19:00 – 22:00 | Сергей Сорокин | 16 000 | Учебный план |
| ZBRUSH Базовый курс (8 занятий) | Вторник, Четверг | 3, 5, 10, 12, 17, 19, 24, 26 | 19:00 – 22:00 | Гарегин Карапетян | 16 000 | Учебный план |
| Анатомический рисунок (8 занятий) | Понедельник, Среда | 2, 4, 9, 11, 16, 18, 23, 25 | 19:00 – 22:00 | Кристина Гашко | 14 000 | Учебный план |
| Анатомический рисунок (8 занятий) | Вторник, Четверг | 3, 5, 10, 12, 17, 19, 24, 26 | 19:00 – 22:00 | 14 000 | Учебный план | |
| Анатомический рисунок (8 занятий) | Понедельник, Среда | 2, 4, 9, 11, 16, 18, 23, 25 | 19:00 – 22:00 | Илья Бородин | 14 000 | Учебный план |
| Основы Анимации в Maya (8 занятий) | Понедельник, Среда | 2, 4, 9, 11, 16, 18, 23, 25 | 19:00 – 22:00 | Давид Аллахвердян | 18 000 | Учебный план |
почему США не «наградили» Киев за антироссийские выпады
12 Мая 2021 г. 08:03
08:03
6 мая Киев посетил с визитом госсекретарь США Энтони Блинкен. Украинские власти назвали это «важным сигналом Европе и России». По версии президента Владимира Зеленского, поддержка Вашингтона позволила надавить на Москву и «остановить вероятную эскалацию со стороны РФ». Однако накануне Блинкен заявил о желании США стабилизировать отношения с Россией, а итоги его поездки в Украину не увенчались какими-либо конкретными соглашениями или шагами. Почему Киев ничего не получил за следование антироссийскому курсу Вашингтона, проанализировал руководитель Центра политэкономических исследований Института нового общества Василий Колташов.
Антироссийская кампания
Что Восточная Европа пережила в первые четыре месяца 2021 г. и как это связано с экономикой России, Украины и США? Россия провела ряд военных учений вблизи границы с Украиной в ответ на угрозу войны со стороны Киева. Эта угроза не была мнимой. Она выразилась не только в резко враждебных словах и позах политиков и «полководцев» ВСУ.
Москве пришлось сосредоточить военные силы в ответ на демонстративное и методичное концентрирование войск бандеровской Украиной в феврале-апреле 2021 г. Эшелоны с военной техникой и солдатами ВСУ днем и ночью шли на границу с Россией, и кадры свидетелей происходившего заполняли блоги. США непрерывно подчеркивали свое намерение поддержать Киев при любом раскладе. Даже когда к маю встал вопрос о встречах глав государств, никак нельзя было сказать, что наступила настоящая, полноценная разрядка.
В начале мая Россия представила
на обсуждение Совета безопасности ООН информацию о страшных событиях 2 мая 2014 г. в Одессе. Как отметил
чудом выживший в бандеровской резне одесский депутат Алексей Албу после своего выступления на мероприятии, он был поражен двумя вещами. Во-первых, цинизмом американских и проамериканских политиков, не желавших видеть никаких фактов и произносивших заученные фразы о вине России во всем и всегда. Во-вторых, в открывшемся во всей красе враждебном окружении России, с которым ничего нельзя поделать ни правдой, ни уступками.
Взвешенные ответы Москвы и указание на необходимость следовать достигнутым ранее Минским соглашениям (не выполняемым именно украинской стороной) вызвали к маю некоторое смягчение риторики Киева. Но антироссийская информационная кампания не была прекращена.
Призывы к войне
В апреле было сказано много. Так, 9 апреля 2021 г. главнокомандующий ВСУ Руслан Хомчак заявил: «Вооруженные силы Украины готовы к реагированию как на обострение ситуации на временно оккупированных территориях, Донецкой и Луганской областях, так и вдоль всей российско-украинской границы. У нас спланированы все соответствующие меры для быстрого реагирования на провокации». Призывами к войне была полна украинская пресса, а депутаты Верховной Рады приняли закон, по которому призыв в армию должен осуществляться методами насильственной вербовки; будущих «защитников Украины» предписали отлавливать полиции. Вашингтон все это одобрял и поощрял.
Если киевские начальники в апреле стали немного более аккуратными в выражениях, то Вашингтон своей риторики не скорректировал, внося ясность в вопрос о том, кто реально создает напряжение. Эта работа имела внутренние американские причины, понять которые без экономического анализа не так просто.
Эта работа имела внутренние американские причины, понять которые без экономического анализа не так просто.
В целом же приготовления к «оборонительной» войне или «операции по возврату оккупированных территорий» на Украине сопровождались большой дипломатической и пропагандисткой работой, которая указывала: происходящее не стоит считать простой демонстрацией, даже если конфликт не развернется.
9 апреля 2021 г. заместитель главы офиса президента Украины Игорь Жовква заявил: украинские спецслужбы обладают информацией о возможном военном противостоянии с Россией. Он также сказал, что стоит ожидать дальнейшей эскалации на Донбассе. Учитывая, что именно украинские войска начали незадолго до этого усиленные обстрелы территории ДНР и ЛНР, в этих словах был огромный цинизм. Однако они немного разбавили внешне миролюбивую риторику Владимира Зеленского после поездки в войска на юго-востоке Украины.
В начале апреля президент Украины старался подчеркнуть, что его страна лишь отвечает на агрессивные акты. Факт массированной переброски украинских сил и сосредоточение их на границе ДНР, ЛНР и России Зеленским и иными украинскими руководителями игнорировался. Между тем, меры по повышению боеготовности сил России, ДНР и ЛНР носили ответный характер и последовали с большой задержкой. Киев производил сосредоточение войск еще в феврале 2021 г.
Факт массированной переброски украинских сил и сосредоточение их на границе ДНР, ЛНР и России Зеленским и иными украинскими руководителями игнорировался. Между тем, меры по повышению боеготовности сил России, ДНР и ЛНР носили ответный характер и последовали с большой задержкой. Киев производил сосредоточение войск еще в феврале 2021 г.
Псевдоаналитика
Американские политики на протяжении весны высказывались прямолинейно и целиком игнорировали призывы Москвы к выполнению Минских соглашений украинским руководством. Газета The Washington Post опубликовала 8 апреля статью под громким заглавием: «Путин снова грозит войной Украине. Запад должен быть готов ответить». В статье содержались наброски вероятного сценария войны с весьма привычными для американской пропаганды акцентами: «…он (Путин), возможно, хочет быстро расквасить нос украинским силам, после чего может потребовать от Зеленского пойти на политические уступки в обмен на новое прекращение огня. Он также может надеяться подорвать усилия Байдена по восстановлению американо-европейских отношений за счет обострения трансатлантических разногласий по Украине».
Не менее интересен другой фрагмент статьи: «Западные правительства будут надеяться, что шквал их дипломатических усилий сдержит Путина – но они должны быть готовы и к тому, что этого не произойдет… Путину нельзя позволить использовать войну против Украины как способ спастись от усугубляющихся внутриполитических проблем». Спекулятивный акцент на личности президента России являлся традиционным для западной пропаганды. Под внутриполитическими проблемами в тексте понимаются социальные и экономические трудности России, а также рост общественного недовольства российским руководством, в котором редакция старается уверить публику.
Все это звучит на основе чистого воображения, без фактов и анализа процессов в российском обществе.
Честный анализ показал бы западным политикам, что ориентирующаяся на них неолиберальная оппозиция в России терпит фиаско вовсе не случайно. Но честный анализ не нужен тем, кто определился с целями.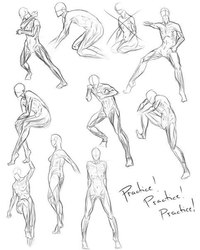 Вместе с этим видно: за фразами о социально-политическом кризисе в России укрываются реальные проблемы США, которые авторы подобных материалов знают неплохо и совершенно механически переносят на Россию. Впрочем, эта игра не принесла США успеха.
Вместе с этим видно: за фразами о социально-политическом кризисе в России укрываются реальные проблемы США, которые авторы подобных материалов знают неплохо и совершенно механически переносят на Россию. Впрочем, эта игра не принесла США успеха.
Итоги
Дипломатические баталии в марте-апреле оказались нелегкими. Они в целом обернулись успехом Москвы: Германия и даже бюрократия ЕС должны были признать необходимость получения природного газа из России, что означает завершение «Северного потока – 2»; Берлин и Париж дали Зеленскому понять, что не собираются поощрять его агрессивность и подыгрывать во всем, как этого хотели бы в Киеве и Вашингтоне. Пришел май. Напряжение осталось. Угроза военной агрессии со стороны Украины осталась. Обстрелы со стороны ВСУ территории республик Донбасса не прекратились. Но война Украины против России, которой так грозил бандеровский Киев, не началась. Пока.
Что все это означает в экономическом плане? США не решили своих задач: не помешали росту российских поставок в ЕС, не породили новый шок и новую тревожность в мире, чтобы панические потоки капиталов устремились на фондовый рынок США, снова придав ему образ «тихой гавани»; Москва не была унижена или разгромлена в политическом плане. Военный успех Киева в обстановке мая предстал сомнительным, учитывая и открывшийся факт планировавшегося американскими агентами убийства президента Белоруссии и членов его семьи.
Военный успех Киева в обстановке мая предстал сомнительным, учитывая и открывшийся факт планировавшегося американскими агентами убийства президента Белоруссии и членов его семьи.
США вновь предстали поджигателями войн, Зеленский как был, так и остался их марионеткой. Украина экономически ничего от войны угроз и дипломатических выпадов не получила. Транзит в широком смысле она теряет, окукливаясь далее в своем тяжком социально-национальном кризисе.
Все ли это итоги? Напряжение остается, и по-настоящему итоги нужно будет подводить осенью 2021 г. Максимум, что может случиться за это время – чрезвычайно глупая военная авантюра Киева. Впрочем, визит государственного секретаря США Энтони Блинкена на Украину, кажется, показал, что в руководстве США поняли, к каким катастрофическим результатам для них эта авантюра может привести. Но точно ли поняли?
Василий Колташов, руководитель Центра политэкономических исследований Института нового общества
Позы человека: психология
Мы все привыкли думать, что о психологическом состоянии человека проще всего узнать по выражению лица. Но мало кто берет во внимание то, на сознательном уровне человек может контролировать мимику лица намного лучше, чем движения тела.
Но мало кто берет во внимание то, на сознательном уровне человек может контролировать мимику лица намного лучше, чем движения тела.
Например, когда знает о том, что необходимо будет соврать или скрывает свои чувства. Поэтому необходимо знать, какую информацию можно обрести, интерпретируя позы людей с помощью психологии.
Систематизация поз человека
В научно-популярной литературе можно найти огромное количество систематизаций поз. Важно помнить, что их значения зависят от конкретной ситуации и определенного человека. Эмоциональное расположения человека можно узнать всего за несколько секунд – просто обратив внимание на то, как близко он к Вам наклонен. Вспомните, ведь если Вам интересен человек или то, о чем он говорит, то Вы неумышленно к нему наклоняетесь.
Наклоненная голова — жест внимательного слушания. Наклон на бок символизирует дружеское расположение, а если ноги остались на месте, а тело подалось вперед – Вы явно очень заинтересовали собеседника.
Ладони вверх
Если Ваш собеседник держит руки раскрытыми ладонями вверх – это значит, что человек искренен, открыт и дружески к вам расположен.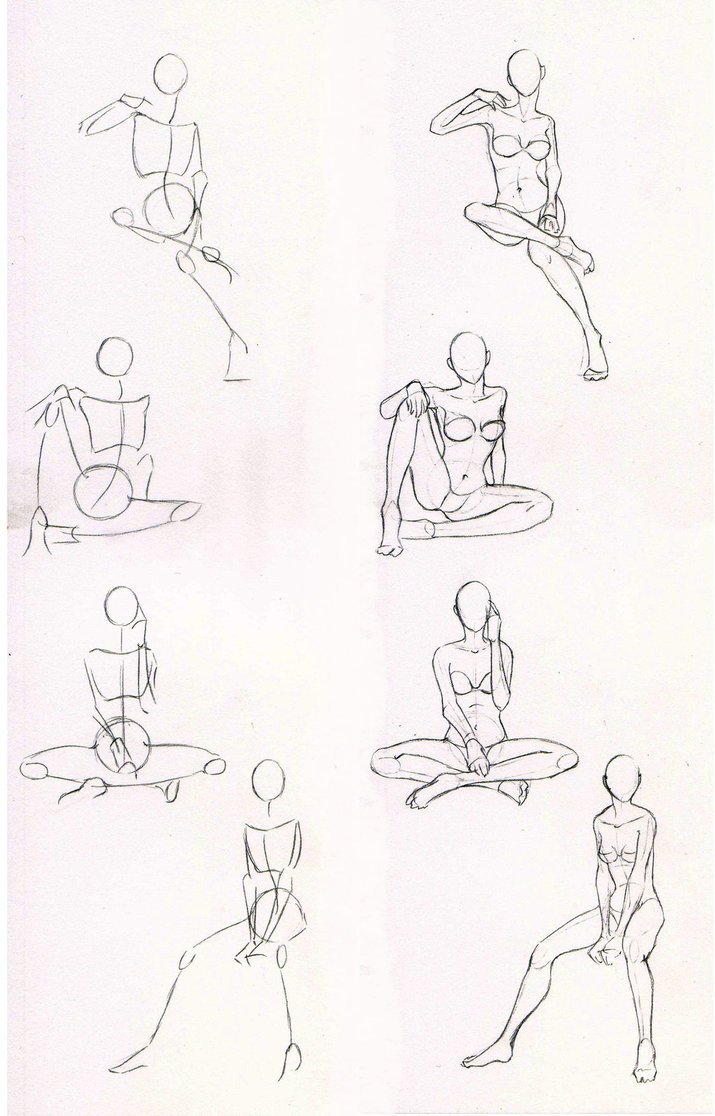
Жесты защиты
Существует также понятие «оборонительные жесты» (или их еще называют «жесты защиты») – это своего рода защитная реакция на конфликт или угрозу. Пример такой защиты являются руки, скрещенные на груди, или сжатые в кулаки. Если не изменить тон, тему разговора или свои действия, то собеседник будет уходить от разговора.
Если у человека опущена голова – это признак того, что он неуверенный, обладает низкой самооценкой или у него проблемы. Исключение составляют только те люди, которые родились в стране, где низко опущенная голова является знаком уважения.
Поза угрозы, агрессивности
Наоборот, резко приподнятая голова (как и выставленный подбородок) – сигнал угрозы, агрессивности. Человек, стоящий в такой позе, пойдет на все, ради решения проблемы. Руки на бедрах также являются признаком готовности к действию.
Проявление авторитарности характера зачастую происходит через такую позу: руки соединены за спиной, а подбородок поднят. Человек, который хочет показать свое превосходство, часто садится выше своего собеседника, а если тот сидит – встает. Когда ноги (или даже все тело) Вашего собеседника направлены к выходу – это показатель того, что человек желает поскорее закончить встречу или разговор.
Когда ноги (или даже все тело) Вашего собеседника направлены к выходу – это показатель того, что человек желает поскорее закончить встречу или разговор.
Видео по теме:
Язык тела — враг мой? 18 жестов и поз, из-за которых вы останетесь без работы. ВИДЕОУРОК | Карьера и бизнес | Деньги
Почему не всем удаётся пройти собеседование, несмотря на безупречное резюме и богатый опыт работы? Потому что на собеседовании важно не только, что мы говорим, но и как мы это говорим и какие скрытые эмоции мы бессознательно выдаём своими позами и жестами.
Итак, какие жесты могут настроить рекрутера ПРОТИВ вас? Рассмотрим запрещённые жесты и позы для каждого из самых часто задаваемых вопросов на собеседовании.
| «Закрытая поза» | |
|---|---|
Вопрос 1.
 Расскажите о себе
Расскажите о себеЗапрещённые жесты
► Как правило, в начале интервью рекрутеры задают вполне стандартные и даже банальные вопросы. У многих соискателей наверняка есть заранее заготовленные ответы на них. Например, вопрос: «Расскажите о себе». Если, отвечая на этот, казалось бы, элементарный вопрос, вы будете сидеть в «закрытой позе», то есть скрестив руки на груди, вы продемонстрируете явно негативную реакцию: либо неуверенность в себе, либо защиту — как будто вы защищаетесь от потенциального работодателя.
► Ещё хуже, если при этом у вас ещё и скрещены ноги. Как правило, эта поза означает, что вам просто-напросто неудобно сидеть, но в сочетании со скрещенными руками её можно трактовать как знак негативного и даже враждебного настроя по отношению к собеседнику. Вполне закономерно, что это вызовет аналогичную реакцию со стороны рекрутера.
► Есть несколько вариаций такой позы. Например, если человек сжимает руки в кулак — это тоже выражает враждебность.
► Если же соискатель не негативно настроен, а просто насторожен и как бы обороняется, он может демонстрировать «неполный барьер» — когда одна рука лежит вдоль тела, немного согнутая в локте, а другая как раз держится за неё в районе локтя.
| «Неполный барьер» | |
|---|---|
► Также «неполный барьер» может быть образован сумочкой, поставленной на колени, или мобильным телефоном — если его держать не одной, а обеими руками.
Реакция рекрутера
Когда рекрутер видит подобные скрытые сигналы от соискателя, он, естественно, будет недоволен и может продемонстрировать вам своё недовольство аналогичными жестами или «закрытыми позами».
Возможен и другой вариант: под конец собеседования ему просто станет скучно, и он не будет этого скрывать: облокотится на кресло и обопрётся подбородком об ладонь, будет отводить глаза идаже на уровне мимики будет показывать, что всё, что вы говорите, ему уже совершенно не важно.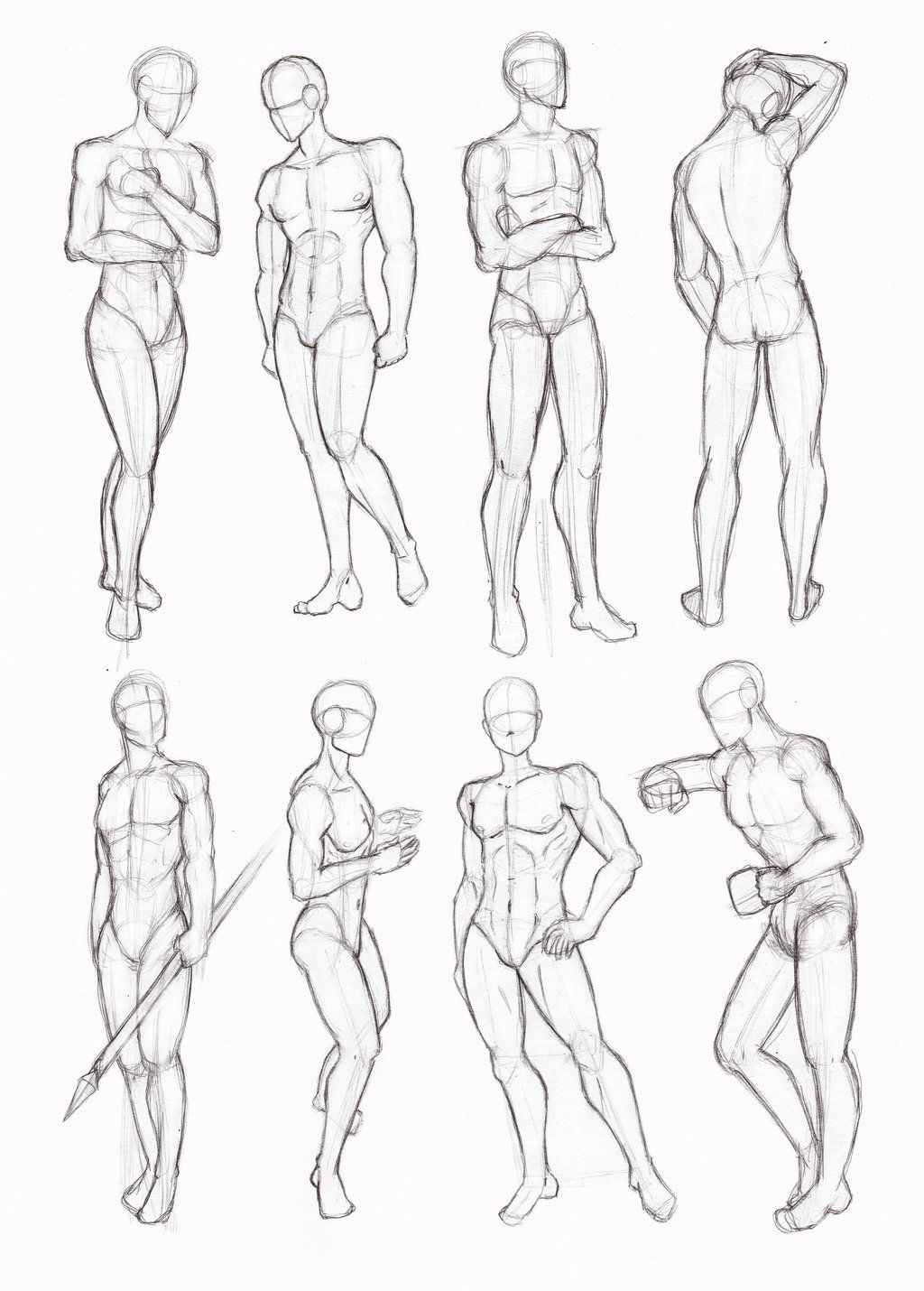
Если вы уж совсем «растечётесь мыслью по древу», рекрутер может потереть ухо — в знак того, что ваш рассказ ему надоел, — или сделать прямой жесть выставленной вперёд прямой ладонью. Это означает «Стоп, хватит, вы уже достаточно наговорились сегодня».
Вопрос 2. Назовите ваши недостатки
Запрещённые жесты
► Самая большая ошибка соискателя — это думать, что такой вопрос изначально глуп, потому что у него — такого замечательного — просто не может быть никаких недостатоков. Тогда кроме «закрытой позы» он будет демонстрировать ещё и самоуверенность и превосходство — скрестив руки на груди, но при этом оставив вверх большие пальцы. Это всё равно что напрямую сказать рекрутеру: «Что за глупый вопрос? Разве не очевидно, что никаких недостатков у меня нет? Такой вопрос мог задать только полный непрофессионал».
| Жест критической оценки |
|
|---|---|
Реакция рекрутера
В ответ рекрутер, скорее всего, продемонстрирует вам критическое отношение к вашим словам: ладонь сбоку у лица, указательный палец вытянут вдоль виска, остальные пальцы согнуты над подбородком или под ним.
Вопрос 3. Почему вы ушли с предыдущего места работы?
Запрещённые жесты
Как правило, в ответ на этот вопрос, кандидаты стараются рассказать, что у них не было возможности для карьерного или профессионального роста, однако истинная причина зачастую оказывается совсем другой. Если соискатель рассказывает рекрутеру про карьерный рост, но при этом:
► прикрывает рот рукой;
► или притрагивается к носу;
► или потирает веко,
рекрутер без труда поймёт, что вы ему просто напросто привираете. Что причина вашего ухода, скорее всего, заключалась в конфликте с начальством или в недовольстве работодателя эффективностью вашей работы. Как ни странно, именно эти обстоятельства соискатели предпочитают скрывать чаще всего.
| Негативное отношение к собеседнику |
|
|---|---|
Реакция рекрутера
Руки, сложенные замком на коленях, означают разочарование и отрицательное отношение к собеседнику. Если же руки подняты до уровня груди, у вас практически нет шансов — этот жест выражает полный и почти бескомпромиссный негатив; вряд ли вам уже удастся понравиться этому рекрутеру.
Если же руки подняты до уровня груди, у вас практически нет шансов — этот жест выражает полный и почти бескомпромиссный негатив; вряд ли вам уже удастся понравиться этому рекрутеру.
Вопрос 4. Назовите желаемый размер зарплаты
Запрещённые жесты
► Даже если цифра, обещанная вам потенциальным работодателям, вызывает у вас неподдельный восторг, не стоит выражать его в открытую и тем более потирать руки (даже еле заметно), поскольку это выдаст ваш единственный реальный мотив для прохождения этого собеседования — жадность. Рекрутер истолкует этот жест так, что вас, мол, интересуют только деньги и ничего кроме денег, вы совершенно не готовы преданно и с энтузиазмом работать на благо компании и её клиентов, вас не беспокоит профессиональный рост и приобретение новых навыков; соответственно, вы не хотите обучаться чему-то новому, «креативить», разрабатывать новые проекты или революционные стратегии и т.д.
Реакция рекрутера
Если собеседнику не понравится ваше отношение к работе (как к источнику обогащения — и не более), это будет видно по его мимике: он может слегка помотать головой из стороны в сторону и скривить губы, выражая недовольство.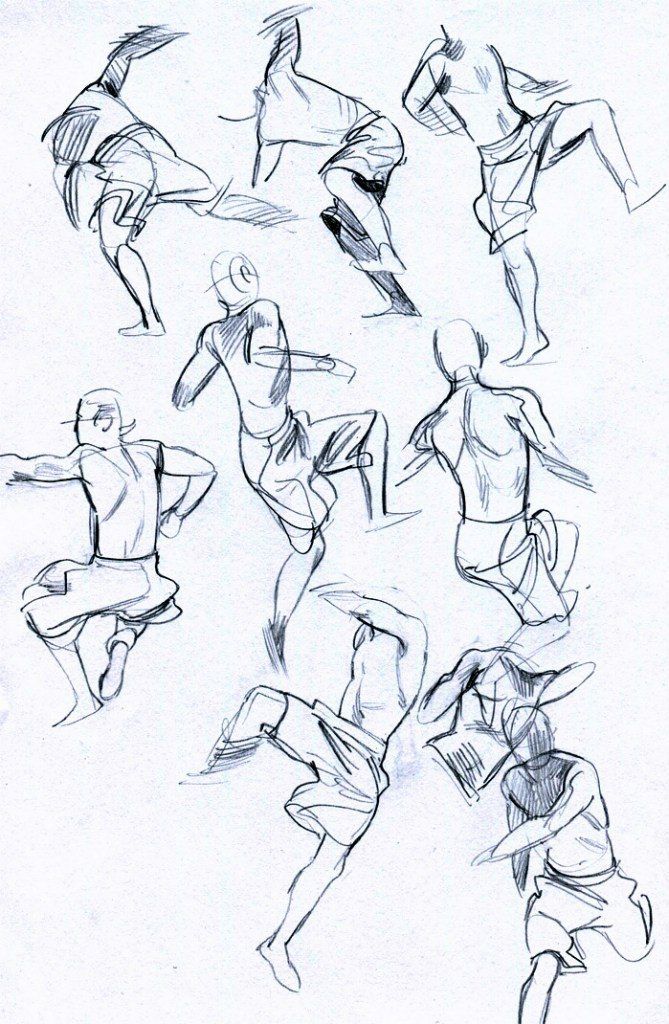
| Признак нервозности | |
|---|---|
Вопрос 5. Как долго вы планируете у нас работать?
Запрещённые жесты
Этот вопрос часто заставляет кандидатов нервничать. Они начинают:
► потирать запястья;
► либо теребить ремешок часов;
► либо как-то закатывать или, наоборот, оправлять рукава.
Всё это — скрытые признаки нервозности, которые говорят о том, что вы ещё не уверены, хотите ли вы задержаться на данном месте работы надолго или просто рассматриваете его как «перевалочный пункт».
Реакция рекрутера
Если собеседник поймёт, что вы готовы сорваться с места, как только вам предложат большую зарплату, он может проявить нетерпение — мол, зачем вы тогда тратите моё время? — и покажет это, постукивая пальцами по подлокотникам или подтягивая локти ближе к спинке кресла, при этом откидываясь назад или, наоборот, резко выпрямляясь.
Вопрос 6. Расскажите о ваших достижениях
Допустимые жесты
Если кандидат гордится своими достижениями и говорит правду, он может использовать жест превосходства или его вариации — например, взяться за лацкан пиджака (край жакета, кофты и т.п.), отставив большой палец вверх.
Запрещённые жесты
► А вот если кандидат скрещивает лодыжки, это скажет рекрутеру о том, что перед ним не совсем уверенный в своих словах человек: возможно, он привирает, и поэтому волнуется, возможно, он чересчур стеснителен и не умеет правильно «подавать» себя; а возможно, он, опять же, негативно относится к рекрутеру и не считает себя обязанным отчитываться перед ним за свои былые заслуги.
Как бы там ни было, этот жест будет вызывать недоверие, а если уж интервьюер начал вам не доверять, скорее всего, собеседование вы провалите.
| Жест недоверия | |
|---|---|
Реакция рекрутера
В ответ ваш собеседник может потереть подбородок: это означает, что он пытается оценить, сколько правды в том, что вы говорите, и является ли только волнение причиной ваших закрытых жестов и поз.
Мужской вариант этого жеста — поглаживание подбородка вдоль, большим и указательным пальцами. Женский вариант — поглаживание вверх-вниз указательным пальцем.
Вопрос 7. Как вы относитесь к переработкам?
Запрещённые жесты
Учтите, что этот вопрос вовсе не означает, что работодатель будет заставлять вас засиживаться допоздна и работать на выходных. Скорее всего, ему и самому это не выгодно. Однако ему приятно было бы знать, что вы будете лояльны компании и в случае чего готовы подставить своё плечо (не исключено, что за дополнительное вознаграждение.
► Однако соискатели зачастую воспринимают этот вопрос в штыки и демонстрируют открытую агрессию и недовольство, упирая одну руку в бок или просто положив её на талию (женский вариант).
► Другой неосторожный жест — это сильный наклон головы вперёд; он выражает явное недовольство и несогласие. В таких случаях говорят, что человек «набычился». Ещё сильнее ваши эмоции могут выдавать поджатые губы и взгляд исподлобья.
Реакция рекрутера
Естественно, работодатель, который считает, что кандидат мог бы в определённых случаях уделить ему и больше положенного по регламенту времени, может почесать шею — показав, таким образом, несогласие с позицией соискателя.
Если интервьюер начинает собирать ворсинки со своей одежды (или разглядывать ногти, как это иногда делают женщины), он как бы намекает своему собеседнику, что ему следовало бы дать другой ответ на этот вопрос.
Вопрос 8. Что вы знаете о нашей компании?
| Острое противоречие | |
|---|---|
Запрещённые жесты
► Любому рекрутеру приятно, когда соискатель приходит на собеседование подготовленным и хорошо отзывается о компании работодателя. Но если при этом слова «О, у вас отличная компания!» сопровождаются указательным жестом назад (рука сгибается в локте, большой палец отставлен вверх, соискатель как бы указывает себе за спину), это говорит о пренебрежительном отношении и даже неуважении со стороны кандидата. Ответ выглядит как отмашка: мол, да скажу я вам всё что угодно о вашей компании, только дайте мне зарплату. А на самом деле он, скорее всего, вообще ничего не знает о компании и её деятельности.
Ответ выглядит как отмашка: мол, да скажу я вам всё что угодно о вашей компании, только дайте мне зарплату. А на самом деле он, скорее всего, вообще ничего не знает о компании и её деятельности.
Реакция рекрутера
Если рекрутер расшифрует этот жест, в ответ он может закинуть ногу на ногу «по-американски», когда одна нога лежит на другой практически параллельно полу. Это поза показывает острое противоречие и даже возмущение.
Вопрос 9. Почему вы хотите работать у нас?
Запрещённые жесты
► Рекрутеры задают этот вопрос, потому что им важно знать, чтобы кандидат был мотивирован на работу именно в данной конкретной компании, а не просто на получение заработка. А вот кандидату к этому моменту уже может поднадоесть затянувшееся интервью, да и сам интервьюер. Он начинает тихо говорит, опускать или отводить глаза, прикрывать веки. То есть убрать надоевший предмет из поля зрения.
Реакция рекрутера
Опытный кадровик тут же прочтёт в этом жесте: «Как ты мне надоел. Да я просто работать хочу, хочу деньги получать, и мне всё равно где их зарабатывать — в этой конторе или в другой».
Да я просто работать хочу, хочу деньги получать, и мне всё равно где их зарабатывать — в этой конторе или в другой».
Момент истины
Если рекрутер принял окончательное решение, он может сложить руки «шпилем». Вариации жеста — шпиль вверх (на уровне груди) или шпиль вниз (руки лежат на коленях).
| Решение принято | |
|---|---|
Учитывая совокупность жестов, описанных выше, скорее всего это решение будет не в вашу пользу.
Урок на будущее
Чтобы избежать разочарования на собеседовании. Приучите чебя быть более открытым и правдивым, не демонстрировать жестов лжи, волнения, агрессии или закрытости. Последите за собой в обыденной жизни: возможно, вы применяете их постоянно, но не придаёте этому никакого значения.
Придя на интервью, сядьте в кресло удобно и расслабленно, примите «открытую позу»: ваши руки свободно лежат на подлокотниках, ноги стоят прямо, параллельно друг другу. Так вы покажете, что вы полностью открыты и готовы к хорошему. Конструктивному диалогу.
Так вы покажете, что вы полностью открыты и готовы к хорошему. Конструктивному диалогу.
AIF.RU благодарит портал Rabota.ru за помощь при подготовке материала.
Смотрите также:
Оценка позы человека: упрощенная | Пракхар Ганеш
Загляните в мир оценки позы человека
Что такое оценка позы человека?Оценка позы человека — важная проблема в области компьютерного зрения. Представьте себе возможность отслеживать каждое небольшое движение человека и проводить биомеханический анализ в режиме реального времени. Эта технология будет иметь огромное значение. Приложения могут включать видеонаблюдение, помощь в проживании, современные системы помощи водителю (ADAS) и спортивный анализ.
Формально говоря, оценка позы предсказывает положение частей тела или суставов человека на основе изображения или видео.
Изображение предоставлено Microsoft COCO Dataset (Lin et al., 2014) Почему этот блог? Я работаю над оценкой позы человека уже более 8 месяцев. Исследования в этой области обширны, как по ширине, так и по глубине. Однако большая часть литературы (исследовательские статьи и блоги) по оценке поз довольно продвинута, что затрудняет накопление кем-то нового.
Исследования в этой области обширны, как по ширине, так и по глубине. Однако большая часть литературы (исследовательские статьи и блоги) по оценке поз довольно продвинута, что затрудняет накопление кем-то нового.
Объем будущих исследований в области оценки позы огромен, и создание обучающего склона может заинтересовать больше людей. Цель блога — дать элементарное представление об оценке позы и, возможно, вызвать интерес к этой области. Любой, у кого нет абсолютно никакого опыта работы с компьютерным зрением, может поверхностно следить за блогом. Даже базового понимания концепций компьютерного зрения достаточно, чтобы полностью разобраться в блоге.
Как я уже сказал ранее, оценка позы человека — это область, требующая огромного количества исследований, как с точки зрения глубины, так и ширины.Постановка задачи может быть классифицирована по следующим осям:
Количество отслеживаемых людей В зависимости от количества отслеживаемых людей оценка позы может быть разделена на оценку позы для одного человека и для нескольких человек. Оценка позы одного человека (SPPE) является более простой из двух, с гарантией присутствия в кадре только одного человека. С другой стороны, оценка позы нескольких человек (MPPE) должна решать дополнительную проблему окклюзии между людьми.Первоначальные подходы к оценке позы были в основном сосредоточены на SPPE, однако с появлением огромных наборов данных с несколькими людьми проблема MPPE в последнее время привлекает повышенное внимание.
Оценка позы одного человека (SPPE) является более простой из двух, с гарантией присутствия в кадре только одного человека. С другой стороны, оценка позы нескольких человек (MPPE) должна решать дополнительную проблему окклюзии между людьми.Первоначальные подходы к оценке позы были в основном сосредоточены на SPPE, однако с появлением огромных наборов данных с несколькими людьми проблема MPPE в последнее время привлекает повышенное внимание.
Под модальностью понимаются различные типы доступных входов. Основываясь на простоте доступности, три основных формы ввода:
- Красно-зеленый-синий (RGB) изображение: Изображения, которые мы видим вокруг нас ежедневно, и наиболее распространенный тип ввода для Оценка позы.Модели, работающие с входом только для RGB, имеют огромное преимущество перед другими с точки зрения мобильности источника входного сигнала. Это связано с тем, что обычные камеры (которые снимают изображения RGB) легко доступны, что делает их моделями, которые можно использовать на огромном количестве устройств.

- Глубина (время полета) изображения: В изображении глубины значение в пикселях относится к расстоянию от камеры, измеренному по времени пролета. Появление и популярность недорогих устройств, таких как Microsoft Kinect, упростили получение данных о глубине.Изображение глубины может дополнять изображение RGB для создания более сложных и точных моделей компьютерного зрения, тогда как модели только с глубиной широко используются там, где важна конфиденциальность.
- Инфракрасное (ИК) изображение: В ИК-изображении значение пикселя определяется количеством инфракрасного света, отраженного обратно в камеру. Эксперименты в области компьютерного зрения на основе ИК-изображений минимальны по сравнению с изображениями RGB и глубины. Microsoft Kinect также предоставляет ИК-изображение во время записи. Однако в настоящее время нет наборов данных, содержащих ИК-изображения.
Видео — это не что иное, как набор изображений, где каждые два последовательных кадра разделяют огромную часть имеющейся в них информации (которая является основой большинства методы сжатия видео). Эта временная (основанная на времени) зависимость в видео может быть использована при выполнении оценки позы.
Эта временная (основанная на времени) зависимость в видео может быть использована при выполнении оценки позы.
Для видео необходимо создать серию поз для входной видеопоследовательности. Ожидается, что в идеале предполагаемые позы должны быть согласованными для последовательных кадров видео, а алгоритм должен быть вычислительно эффективным для обработки большого количества кадров.Проблема окклюзии может быть легче решена для видео из-за наличия прошлых или будущих кадров, в которых часть тела не закрыта.
Если временные характеристики не являются частью конвейера, можно применить оценку статической позы для каждого кадра в видео. Однако результаты обычно не так хороши, как хотелось бы, из-за проблем с нестабильностью и несогласованностью.
Обратите внимание на дрожание в однокадровой модели и плавность во временной модели. Изображение предоставлено Павлло и др.(2018) 2D и 3D оценка позы В зависимости от требований к выходным размерам, задачу оценки позы можно разделить на 2D-оценку и 3D-оценку позы. 2D Pose Estimation — это прогнозирование местоположения суставов тела на изображении (с точки зрения значений пикселей). С другой стороны, 3D-оценка позы прогнозирует трехмерное пространственное расположение всех суставов тела в качестве своего окончательного результата.
2D Pose Estimation — это прогнозирование местоположения суставов тела на изображении (с точки зрения значений пикселей). С другой стороны, 3D-оценка позы прогнозирует трехмерное пространственное расположение всех суставов тела в качестве своего окончательного результата.
Большинство моделей трехмерной оценки позы сначала предсказывают двухмерную позу, а затем пытаются поднять ее до трехмерной позы.Однако также существуют некоторые методы сквозной 3D-оценки позы, которые напрямую предсказывают 3D-позу.
Модель тела Каждый алгоритм оценки позы заранее согласовывает модель тела. Это позволяет алгоритму формализовать задачу оценки позы человека в задачу оценки параметров модели тела. В большинстве алгоритмов в качестве конечного результата используется простая модель жесткого кинематического каркаса с N-соединением (N обычно составляет от 13 до 30). Формально кинематические модели можно представить в виде графа, где каждая вершина V представляет собой сустав. Ребра E могут кодировать ограничения или предыдущие представления о структуре модели тела.
Ребра E могут кодировать ограничения или предыдущие представления о структуре модели тела.
Такой модели достаточно для большинства приложений. Однако для многих других приложений, таких как анимация персонажей, может потребоваться более сложная модель. Некоторые методы рассматривают высокодетализированные сеточные модели, представляющие все тело с помощью облака точек.
Другая довольно примитивная модель тела, которая использовалась в более ранних конвейерах оценки позы, — это модель тела на основе формы. В моделях на основе форм части человеческого тела аппроксимируются с помощью геометрических фигур, таких как прямоугольники, цилиндры, конусы и т. Д.
Кинематическая модель против модели на основе формы против модели на основе сетки Количество камер Основная часть исследований включает решение проблемы оценки позы с использованием ввода с одной камеры. Однако есть определенные алгоритмы, которые пытаются использовать данные с нескольких точек обзора / камер, комбинируя их для создания более точных поз и лучшей обработки окклюзий. Исследования по оценке позы с помощью нескольких камер в настоящее время несколько ограничены, в первую очередь из-за отсутствия хороших наборов данных.
Исследования по оценке позы с помощью нескольких камер в настоящее время несколько ограничены, в первую очередь из-за отсутствия хороших наборов данных.
- Удаление фона: Может потребоваться для сегментации Человека от фона или удаления некоторого шума.
- Создание ограничивающей рамки: Некоторые алгоритмы, особенно в MPPE, создают ограничивающие рамки для каждого человека, присутствующего на изображении. Затем каждая ограничивающая рамка отдельно оценивается для позы человека.
- Калибровка камеры и регистрация изображения: Регистрация изображения требуется в случае использования входов с нескольких камер.В случае 3D-оценки позы человека калибровка камеры также помогает преобразовать полученную наземную истину в стандартные мировые координаты.
Извлечение признаков в Machine Leaning относится к созданию производных значений из необработанных данных (таких как изображение или видео в нашем случае), которые могут использоваться в качестве входных данных для алгоритма обучения. Возможности могут быть явными или неявными. Явные функции включают обычные функции на основе компьютерного зрения, такие как гистограмма ориентированных градиентов (HoG) и масштабно-инвариантное преобразование признаков (SIFT).Эти характеристики вычисляются явно перед подачей входных данных в следующий алгоритм обучения.
Возможности могут быть явными или неявными. Явные функции включают обычные функции на основе компьютерного зрения, такие как гистограмма ориентированных градиентов (HoG) и масштабно-инвариантное преобразование признаков (SIFT).Эти характеристики вычисляются явно перед подачей входных данных в следующий алгоритм обучения.
Неявные функции относятся к картам функций на основе глубокого обучения, таким как выходные данные сложных глубоких сверточных нейронных сетей (CNN). Эти карты функций никогда не создаются явно, но являются частью полного конвейера, обученного от начала до конца.
VGG16: архитектура извлечения признаков и классификации изображений на основе CNN Вывод Карты достоверности: Распространенный способ прогнозирования местоположений суставов — создание карт достоверности для каждого сустава.Карты достоверности — это распределение вероятностей по изображению, представляющее достоверность совместного местоположения в каждом пикселе.
- Подход снизу вверх: Подход снизу вверх включает сначала обнаружение частей или суставов одного или нескольких людей на изображении, а затем сборку частей вместе и связывание их с конкретным человеком.
Проще говоря, алгоритм сначала предсказывает все части тела / суставы, присутствующие на изображении. Обычно за этим следует построение графика, основанного на модели тела, который соединяет суставы, принадлежащие одному и тому же человеку.Целочисленное линейное программирование (ILP) или двудольное сопоставление — два распространенных метода создания этого графа.
- Подход сверху вниз: Подходы сверху вниз включают в себя этап сегментации в начале, когда каждый человек сначала сегментируется в ограничивающий прямоугольник, после чего оценка позы выполняется индивидуально для каждого ограничивающего прямоугольника.

Оценка позы сверху вниз может быть разделена на подходы, основанные на генеративной модели тела и основанные на глубоком обучении.Подход, основанный на генеративной модели тела, включает попытку подогнать модель тела к изображению, чтобы окончательный прогноз был похож на человека. Подход, основанный на глубоком обучении, позволяет напрямую прогнозировать расположение суставов, поэтому окончательный прогноз не гарантирует, что он будет похож на человека.
Многие алгоритмы, включая подходы «снизу вверх» и «сверху вниз», не имеют ограничений отношения к конечному результату.Проще говоря, алгоритм, прогнозирующий положение суставов по входному изображению, не имеет никакого фильтра для отклонения / исправления неестественной позы человека. Иногда это может привести к странной оценке позы человека.
Оценка позы с использованием Kinect, содержащая странную и неестественную позу Чтобы справиться с этим, существует набор алгоритмов постобработки, которые отклоняют неестественные позы человека. Выходная поза из любого конвейера оценки позы проходит через алгоритм обучения, который оценивает каждую позу на основе ее вероятности.Позы, получившие оценку ниже порогового значения, игнорируются на этапе тестирования.
Выходная поза из любого конвейера оценки позы проходит через алгоритм обучения, который оценивает каждую позу на основе ее вероятности.Позы, получившие оценку ниже порогового значения, игнорируются на этапе тестирования.
Краткое введение в несколько распространенных наборов данных в оценке позы человека.
- MPII: Набор данных позы человека MPII — это набор данных для двухмерной оценки позы, состоящий из почти 500 различных человеческих действий, собранных из видеороликов Youtube. MPII был первым набором данных, содержащим такой разнообразный диапазон поз, и первым набором данных, в котором в 2014 году была запущена задача оценки 2D-поз.
- COCO: Набор данных COCO keypoints — это набор данных для двухмерной оценки позы с изображениями, полученными с Flickr. COCO — это крупнейший на сегодняшний день набор данных для 2D-оценки позы, который рассматривает возможность эталона для тестирования алгоритмов 2D-оценки позы.
- HumanEva: HumanEva — это набор данных для трехмерной оценки позы одного человека, содержащий видеопоследовательности, записанные с помощью нескольких камер RGB и полутоновых изображений.
 Трехмерные позы правдивости снимаются с помощью маркерных камер захвата движения (mocap).HumanEva была первым набором данных 3D Pose Estimation значительного размера.
Трехмерные позы правдивости снимаются с помощью маркерных камер захвата движения (mocap).HumanEva была первым набором данных 3D Pose Estimation значительного размера. - Human3.6M: Human3.6M — это набор данных 2D / 3D оценки поз для одного человека, содержащий видеопоследовательности, в которых 11 актеров выполняют 15 различных возможных действий, записанных с использованием RGB и времяпролетных (глубинных) камер. . 3D позы получаются с помощью 10 камер мокап. Human3.6M — это самый крупный на сегодняшний день набор данных реальной 3D-оценки позы.
- SURREAL: SURREAL — это набор данных для 2D / 3D оценки позы одного человека, содержащий виртуальные видео-анимации, созданные с использованием данных mocap, записанных в лаборатории.SURREAL — это самый большой набор данных для 3D-оценки позы, но он еще не принят в качестве эталона для сравнения алгоритмов 3D-оценки позы. Это в основном потому, что это синтетический набор данных.
Оценка позы человека — это развивающаяся дисциплина с возможностью исследования по разным направлениям. В последнее время в оценке позы человека наметилась заметная тенденция перехода к использованию глубокого обучения, в частности подходов на основе CNN, из-за их превосходной производительности при выполнении задач и наборов данных.Одной из основных причин успеха глубокого обучения является доступность больших объемов обучающих данных, особенно с появлением наборов данных COCO и Human3.6M.
В последнее время в оценке позы человека наметилась заметная тенденция перехода к использованию глубокого обучения, в частности подходов на основе CNN, из-за их превосходной производительности при выполнении задач и наборов данных.Одной из основных причин успеха глубокого обучения является доступность больших объемов обучающих данных, особенно с появлением наборов данных COCO и Human3.6M.
Если вы заинтересованы в дальнейшем чтении и более подробном изучении оценки позы человека, ознакомьтесь с этими ресурсами.
Руководство по технологиям оценки позы человека на 2021 год
«Возможно ли технологическое решение заменить тренеров по фитнесу? Что ж, кто-то еще должен мотивировать вас словами: «Давай, даже моя бабушка может лучше!» Но с технологической точки зрения это требование высокого уровня привело нас к технологии трехмерной оценки позы человека.
В этой статье я опишу наш собственный опыт разработки и реализации 3D-оценки позы человека для решения AI фитнес-тренера.
3D-оценка позы человека в приложениях AI Fitness Coach
Скачать PDFНажимая кнопку «ПОЛУЧИТЬ PDF» ниже, вы соглашаетесь и предоставляете нам право обрабатывать персональные данные, указанные вами в полях выше. Ваши личные данные могут быть использованы для профилирования нашей клиентской базы и для связи с вами с коммерческими предложениями.Вы имеете право отозвать свое согласие в любое время, отправив запрос на [email protected].
Спасибо!
URL для загрузки файла PDF был отправлен на вашу электронную почту
ХорошоЧто такое оценка позы человека?
Оценка позы человека — это основанная на компьютерном зрении технология, которая определяет и анализирует позу человека. Основным компонентом оценки позы человека является моделирование человеческого тела. Существует три наиболее часто используемых типа моделей человеческого тела: модель на основе скелета, модель на основе контура и модель на основе объема.
Модель на основе скелета состоит из набора суставов (ключевых точек), таких как лодыжки, колени, плечи, локти, запястья и ориентации конечностей, составляющих скелетную структуру человеческого тела. Эта модель используется как в 2D, так и в 3D методах оценки позы человека из-за ее гибкости.
Эта модель используется как в 2D, так и в 3D методах оценки позы человека из-за ее гибкости.
Модель на основе контура состоит из контура и приблизительной ширины туловища и конечностей тела, где части тела представлены границами и прямоугольниками силуэта человека.
Объемная модель состоит из трехмерных форм человеческого тела и поз, представленных объемными моделями с геометрическими сетками и формами, обычно получаемыми с помощью трехмерного сканирования.
Источник
Здесь я говорю о каркасных моделях , которые могут быть обнаружены с двухмерной или трехмерной перспективы.
2D оценка позы основана на обнаружении и анализе координат X, Y суставов человеческого тела из изображения RGB.
Оценка позы 3D основана на обнаружении и анализе координат X, Y, Z суставов человеческого тела из изображения RGB.
Говоря о фитнес-приложениях, связанных с оценкой позы человека, лучше использовать 3D-оценку, поскольку она более точно анализирует позы человека во время физических нагрузок.
Если говорить о приложениях для тренеров по фитнесу с ИИ, общий алгоритм выглядит следующим образом:
- Записывать движения пользователя во время выполнения упражнения
- Анализировать правильность выполнения упражнения
- Отображение ошибок в пользовательском интерфейсе
Как работает 3D-оценка позы человека
Визуальное изображение того, как технология трехмерной оценки позы человека определяет ключевые точки на теле человека, выглядит следующим образом:
Процесс обычно включает извлечение суставов на теле человека, а затем анализ позы человека с помощью алгоритмов глубокого обучения.Если система оценки позы человека использует видеозаписи в качестве источника данных, ключевые точки (местоположения суставов) обнаруживаются из последовательности кадров, а не из одного изображения. Это позволяет нам достичь большей точности, поскольку система анализирует фактическое движение человека, а не его устойчивое положение.
Это позволяет нам достичь большей точности, поскольку система анализирует фактическое движение человека, а не его устойчивое положение.
Существует несколько способов разработки трехмерной системы оценки позы человека для фитнеса. Наиболее оптимальными способами является обучение модели глубокого обучения извлечению ключевых точек 3D или 2D из заданных изображений / кадров
Конечно, использование видеопотоков с нескольких камер с разным обзором на одного и того же человека, выполняющего упражнения, даст нам большую точность.Но мультикамеры часто недоступны. Кроме того, для обработки анализа видео из нескольких видеопотоков потребуется больше мощности компьютера.
Для нашего исследования мы использовали один источник видео для анализа. И применили сверточные нейронные сети (CNN) с расширенными временными свертками (см. Видео ниже).
Источник
Мы провели анализ существующих моделей и выяснили, что VideoPose3D — самый оптимальный выбор для целей фитнес-приложения. На входе должен быть обнаружен набор двухмерных ключевых точек, где набор данных COCO 2017 применяется в качестве предварительно обученного двухмерного детектора. Для точного прогнозирования текущего положения сустава он обрабатывает визуальные данные из нескольких кадров, снятых в разные периоды времени.
На входе должен быть обнаружен набор двухмерных ключевых точек, где набор данных COCO 2017 применяется в качестве предварительно обученного двухмерного детектора. Для точного прогнозирования текущего положения сустава он обрабатывает визуальные данные из нескольких кадров, снятых в разные периоды времени.
Как использовать оценку позы человека в приложении AI Fitness Coach
Цифровизация не обошла стороной и фитнес-индустрию. Согласно отчету Research and Markets, ожидается, что объем рынка цифрового фитнеса достигнет 27 долларов.4 миллиарда к 2022 году.
3D-оценка позы человека — относительно новая, но быстро развивающаяся технология в области цифрового фитнеса. После анализа и практического опыта работы с трехмерными системами оценки позы человека мы пришли к собственному видению того, как это можно реализовать. Давайте рассмотрим, как можно построить эту систему, чтобы она могла анализировать движения автоматически, используя видео пользователей, выполняющих физические упражнения.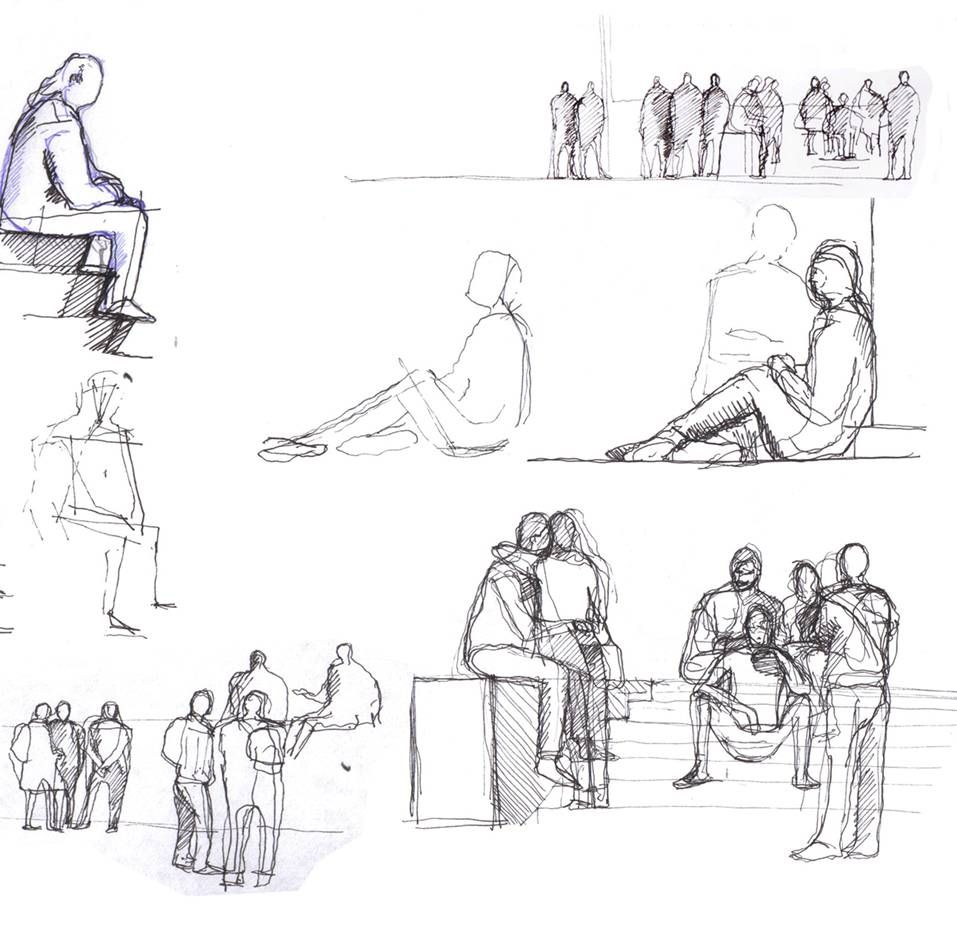
Предполагая, что цель данной системы — проверить входное видео на предмет распространенных ошибок упражнений и сравнить его с эталонным видео, где профессиональный спортсмен выполняет то же упражнение, последовательность действий будет выглядеть следующим образом:
1.Обрезка входного видео в зависимости от начала и окончания упражнения
Для индикации начальной и конечной точек мы можем автоматически определять положение контрольных точек тела с помощью произвольных пороговых значений. Например, при приседании можно определить угол наклона рук и положение рук по высоте, а затем, используя произвольные пороговые значения, мы можем определить начальную и конечную точки упражнения.
Источник видео
Еще один способ — попросить пользователя указать начало и конец выполнения упражнения вручную.
2. Обнаружение 2D и 3D ключевых точек на теле пользователя
3. Разбивка фаз учений
При извлечении позиций ключевых точек (стыков) их следует сравнить с позициями эталонного видео. Однако мы не можем провести прямое сравнение, потому что скорость выполнения упражнения и общее количество повторений на исходных и справочных видео могут отличаться.
Однако мы не можем провести прямое сравнение, потому что скорость выполнения упражнения и общее количество повторений на исходных и справочных видео могут отличаться.
Эти несоответствия могут быть устранены путем разделения упражнения на фазы.Мы можем видеть, как это проиллюстрировано на изображении ниже, где упражнение приседания разделено на две основные фазы: приседание вниз и приседание вверх.
Источник фото: stronglifts.com
Декомпозиция может быть выполнена путем анализа ключевых точек, обнаруженных во входном видео, кадр за кадром, а затем их сравнения по определенным критериям с ключевыми точками из эталонного видео.
4. В поисках типичных ошибок
Когда обнаруживаются трехмерные ключевые точки и определенные фазы упражнения, пора обнаружить типичные ошибки в технике упражнения во входном видео.Например, при приседании мы можем обнаружить моменты, когда ноги согнуты (не прямые) и колени находятся ближе к центру туловища, чем ступни.
Источник видео
5. Сравнение исходных видеокадров с эталонными
Здесь мы должны взять эталонное видео, где упражнение выполняется правильно, разбить его на фазы и определить ключевые точки в каждом кадре. Когда ключевые точки обнаружены и фазы упражнений определены как во входных, так и в справочных видео, мы можем сравнить каждую фазу упражнения, выполняемого пользователем и профессиональным спортсменом.
Пошаговая инструкция выглядит следующим образом:
а. Замедление / ускорение эталонного видео для соответствия скорости входного.
г. Выровняйте скелетные модели пользователя и профессионального спортсмена так, чтобы угол их поворота и исходное положение совпадали.
г. Нормализуйте размер обоих скелетов, так как эталонное и исходное видео можно снимать с разных расстояний.
г. Сравнивайте ключевые точки кадр за кадром и обнаруживайте несоответствия движения.
e. Повторите процедуру отдельно для разных групп суставов (например, положение ног, положение колен, положение рук и локтей и т. Д.).
Д.).
6. Отображение результатов и выработка рекомендаций для пользователя
Когда весь цикл анализа будет завершен, пользователь получит результаты, отображаемые в разных форматах. Например, выходные данные могут включать интерактивные трехмерные реконструкции с подсказками об ошибках, чтобы пользователь мог увеличивать / уменьшать масштаб, возвращаться назад, вперед или останавливаться в определенный момент.Также можно собирать и отображать статистику движений, такую как количество повторений, средняя скорость и продолжительность одного повторения и другие.
Визуально система оценки позы человека в 3D на основе видео выглядит следующим образом:
Источники фото: stronglifts.com, канал Men’s Health
В этой статье я описал, как работает система оценки позы человека в 3D с точки зрения разработки приложения для ИИ-тренера по фитнесу, потому что она на примере хорошо иллюстрирует, как это может работать.Но обратите внимание, что поток может быть изменен в зависимости от бизнес-требований или других факторов.
Особенности:
- 3D-оценку позы человека можно использовать для обнаружения ошибок движения в фитнес-упражнениях.
- Выбор правильного 2D-детектора ключевых точек имеет решающее значение для получения высококачественных 3D-точек.
- Закрытые или быстро движущиеся суставы может быть сложно обнаружить для 2D-моделей ключевых точек и привести к неправильным / случайным прогнозам.
- При использовании предварительно обученных моделей важно помнить, что они, скорее всего, не подойдут для необычных движений и положений тела.Вероятно, вам потребуется точная настройка или повторное обучение, по крайней мере, уточнение модели на предметно-ориентированных или целенаправленно расширенных данных.
3D-оценка позы человека в приложениях AI Fitness Coach
Скачать PDF Нажимая кнопку «ПОЛУЧИТЬ PDF» ниже, вы соглашаетесь и предоставляете нам право обрабатывать персональные данные, указанные вами в полях выше. Ваши личные данные могут быть использованы для профилирования нашей клиентской базы и для связи с вами с коммерческими предложениями. Вы имеете право отозвать свое согласие в любое время, отправив запрос на info @ mobidev.бизнес
Вы имеете право отозвать свое согласие в любое время, отправив запрос на info @ mobidev.бизнес
Спасибо!
URL-адрес для загрузки PDF-файла был отправлен на вашу электронную почту
OkНа устройстве, отслеживание позы тела в реальном времени с помощью MediaPipe BlazePose
Чтобы охватить широкий спектр клиентского оборудования, мы представляем две модели отслеживания позы: облегченную и полную, которые различаются по соотношению скорости и качества. Для оценки производительности CPU мы используем XNNPACK; для мобильных графических процессоров мы используем бэкэнд графического процессора TFLite.
Приложения
На основе позы человека мы можем создавать различные приложения, например фитнес-трекеры или трекеры йоги.В качестве примера мы приводим счетчики приседаний и отжиманий, которые могут автоматически подсчитывать статистику пользователей или проверять качество выполненных упражнений. Такие варианты использования могут быть реализованы либо с использованием дополнительной сети классификаторов, либо даже с помощью простого совместного попарного алгоритма поиска расстояния, который соответствует ближайшей позе в нормализованном пространстве поз.
| Счетчик количества выполненных упражнений на основе обнаруженной позы тела. Слева: приседаний; Вправо: Отжимания |
Заключение
Мы выпустили версию BlazePose, ориентированную на варианты использования верхней части тела в MediaPipe, работающие на Android, iOS и Python.BlazePose также будет доступен для более широкого сообщества мобильных разработчиков через API обнаружения поз в предстоящем выпуске ML Kit. Помимо мобильного домена, мы также просматриваем нашу веб-версию в браузере. Мы надеемся, что предоставление этой функции восприятия позы человека более широкому сообществу исследователей и разработчиков приведет к появлению творческих вариантов использования, стимулированию новых приложений и новым направлениям исследований.
Мы планируем расширить эту технологию с помощью более надежного и стабильного отслеживания для еще большего разнообразия человеческих поз и действий. В прилагаемой карточке модели мы подробно описываем предполагаемое использование, ограничения и справедливость модели, чтобы гарантировать, что использование этих моделей соответствует Принципам Google в области искусственного интеллекта. Мы считаем, что публикация этой технологии может дать толчок новым творческим идеям и приложениям со стороны членов исследовательского сообщества и сообщества разработчиков в целом. Мы очень рады видеть, что вы можете с его помощью построить!
В прилагаемой карточке модели мы подробно описываем предполагаемое использование, ограничения и справедливость модели, чтобы гарантировать, что использование этих моделей соответствует Принципам Google в области искусственного интеллекта. Мы считаем, что публикация этой технологии может дать толчок новым творческим идеям и приложениям со стороны членов исследовательского сообщества и сообщества разработчиков в целом. Мы очень рады видеть, что вы можете с его помощью построить!
| Результаты BlazePose по сценариям использования йоги |
Благодарности
Особая благодарность всем членам нашей команды, которые работали с нами над технологией: Фан Чжан, Арциому Аблаватски, Юрию Картыннику, Тайлеру Жу, Картику Равендрану, Андрею Вакунову, Андрею Ткаченко, Марату Духану, Раману Сарленокину, Тайлеру Мулленокину Грегори Карпяк, Сурил Шах, Бак Бурдон, Цзюцян Тан, Мин Гуан Йонг, Чуо-Лин Чанг, Джухен Ли, Майкл Хейс, Камилло Лугареси, Эша Убоведжа, Сергей Казаку, Андрей Кулик, Мацвей Жданович и Матиас Грундманн.
Оценка позы из видео играет критически важную роль, позволяя накладывать цифровой контент и информацию поверх физического мира в дополненной реальности, распознавать язык жестов, управлять жестами всего тела и даже количественно определять физические упражнения, что может стать основой для йоги. , танцевальные и фитнес-приложения. Оценка позы для фитнес-приложений особенно сложна из-за большого разнообразия возможных поз (например,g., сотни асан йоги), многочисленные степени свободы, окклюзии (например, тело или другие предметы закрывают конечности, если смотреть в камеру), а также различные образы или наряды.
| Результаты BlazePose в сценариях использования фитнеса и танцев. |
Сегодня мы объявляем о выпуске нового подхода к восприятию позы человеческого тела, BlazePose, который мы представили на семинаре CV4ARVR на CVPR 2020. Наш подход обеспечивает отслеживание позы человека с помощью машинного обучения (ML) для определения 33 2D ориентиров объекта корпус из единого каркаса.В отличие от текущих моделей поз, основанных на стандартной топологии COCO, BlazePose точно локализует больше ключевых точек, что делает его уникальным для фитнес-приложений. Кроме того, современные современные подходы основаны в первую очередь на мощных средах рабочего стола для вывода, в то время как наш метод обеспечивает производительность в реальном времени на мобильных телефонах с выводом процессора. Если использовать вывод графического процессора, BlazePose обеспечивает производительность в режиме супер-реального времени, позволяя запускать последующие модели машинного обучения, такие как отслеживание лица или рук.
Наш подход обеспечивает отслеживание позы человека с помощью машинного обучения (ML) для определения 33 2D ориентиров объекта корпус из единого каркаса.В отличие от текущих моделей поз, основанных на стандартной топологии COCO, BlazePose точно локализует больше ключевых точек, что делает его уникальным для фитнес-приложений. Кроме того, современные современные подходы основаны в первую очередь на мощных средах рабочего стола для вывода, в то время как наш метод обеспечивает производительность в реальном времени на мобильных телефонах с выводом процессора. Если использовать вывод графического процессора, BlazePose обеспечивает производительность в режиме супер-реального времени, позволяя запускать последующие модели машинного обучения, такие как отслеживание лица или рук.
| Верхняя модель BlazePose в MediaPipe |
Топология
Текущим стандартом позы человеческого тела является топология COCO, которая состоит из 17 ориентиров на туловище, руках, ногах и лице. Однако ключевые точки COCO локализуются только в точках лодыжки и запястья, не имея информации о масштабе и ориентации для рук и ног, что жизненно важно для практических приложений, таких как фитнес и танцы.Включение большего количества ключевых точек имеет решающее значение для последующего применения моделей оценки позы, зависящих от предметной области, например, для рук, лица или ног.
Однако ключевые точки COCO локализуются только в точках лодыжки и запястья, не имея информации о масштабе и ориентации для рук и ног, что жизненно важно для практических приложений, таких как фитнес и танцы.Включение большего количества ключевых точек имеет решающее значение для последующего применения моделей оценки позы, зависящих от предметной области, например, для рук, лица или ног.
В BlazePose мы представляем новую топологию из 33 ключевых точек человеческого тела, которая является надмножеством топологий COCO, BlazeFace и BlazePalm. Это позволяет нам определять семантику тела только на основе предсказания позы, которое согласуется с моделями лица и рук.
| Топология ключевых точек BlazePose 33 как расширенный набор COCO (окрашен зеленым) |
Обзор: конвейер машинного обучения для отслеживания позы
Для оценки позы мы используем наш проверенный двухэтапный конвейер машинного обучения детектор-трекер. С помощью детектора этот конвейер сначала определяет область интереса позы (ROI) в кадре. Затем трекер предсказывает все 33 ключевые точки позы из этой области интереса. Обратите внимание, что для случаев использования видео детектор запускается только на первом кадре. Для последующих кадров мы получаем ROI из ключевых точек позы в предыдущем кадре, как описано ниже.
С помощью детектора этот конвейер сначала определяет область интереса позы (ROI) в кадре. Затем трекер предсказывает все 33 ключевые точки позы из этой области интереса. Обратите внимание, что для случаев использования видео детектор запускается только на первом кадре. Для последующих кадров мы получаем ROI из ключевых точек позы в предыдущем кадре, как описано ниже.
| Обзор конвейера оценки позы человека. |
Обнаружение позы путем расширения BlazeFace
Для выполнения в реальном времени всего конвейера машинного обучения, состоящего из моделей обнаружения и отслеживания позы, каждый компонент должен быть очень быстрым, используя всего несколько миллисекунд на кадр.Для этого мы наблюдаем, что самым сильным сигналом нейронной сети о положении туловища является лицо человека (из-за его высококонтрастных черт и сравнительно небольших вариаций внешнего вида). Таким образом, мы достигли быстрого и легкого детектора позы, сделав сильное (но верное для многих мобильных и веб-приложений) предположение о том, что голова должна быть видна для нашего случая использования с одним человеком.
Таким образом, мы достигли быстрого и легкого детектора позы, сделав сильное (но верное для многих мобильных и веб-приложений) предположение о том, что голова должна быть видна для нашего случая использования с одним человеком.
Следовательно, мы обучили детектор лиц, вдохновленный нашей субмиллисекундной моделью BlazeFace, в качестве прокси для детектора позы.Обратите внимание, что эта модель определяет только местоположение человека в кадре и не может использоваться для идентификации людей. В отличие от конвейеров отслеживания Face Mesh и MediaPipe Hand, в которых мы получаем ROI из прогнозируемых ключевых точек, для отслеживания позы человека мы явно прогнозируем две дополнительные виртуальных ключевых точек, которые четко описывают центр человеческого тела, вращение и масштаб в виде круга. Вдохновленные Витрувианским человеком Леонардо, мы прогнозируем среднюю точку бедер человека, радиус окружности, описывающей всего человека, и угол наклона линии, соединяющей середины плеч и бедер. Это приводит к последовательному отслеживанию даже в очень сложных случаях, таких как определенные асаны йоги. На рисунке ниже показан подход.
Это приводит к последовательному отслеживанию даже в очень сложных случаях, таких как определенные асаны йоги. На рисунке ниже показан подход.
| Витрувианский человек, выровненный по двум виртуальным ключевым точкам, предсказанным нашим детектором BlazePose в дополнение к ограничивающей рамке лица |
Модель отслеживания
Компонент оценки позы конвейера предсказывает местоположение всех 33 ключевых точек человека с тремя степенями свободы каждая (положение x, y и видимость) плюс две виртуальные ключевые точки выравнивания, описанные выше.В отличие от текущих подходов, которые используют прогнозирование тепловой карты с интенсивными вычислениями, наша модель использует подход регрессии, при котором контролируется путем комбинированного прогнозирования тепловой карты / смещения всех ключевых точек, как показано ниже.
| Сетевая архитектура отслеживания: регрессия с контролем тепловой карты |
В частности, во время обучения мы сначала используем тепловую карту и компенсацию потерь для обучения центральной и левой опоры сети. Затем мы удаляем выходные данные тепловой карты и обучаем кодировщик регрессии (правая башня), таким образом эффективно используя тепловую карту для наблюдения за легким встраиванием.
Затем мы удаляем выходные данные тепловой карты и обучаем кодировщик регрессии (правая башня), таким образом эффективно используя тепловую карту для наблюдения за легким встраиванием.
В таблице ниже показано исследование абляции качества модели, полученное в результате различных стратегий обучения. В качестве метрики оценки мы используем процент правильных точек с допуском 20% ([email protected]) (где мы предполагаем, что точка была обнаружена правильно, если двухмерная евклидова ошибка меньше 20% от размера туловища соответствующего человека).Чтобы получить базовый уровень, мы попросили аннотаторов аннотировать несколько образцов с избыточностью и получили среднее значение [email protected] из 97,2. Обучение и проверка проводились на разнородном по географическому признаку наборе данных различных поз, взятых единообразно.
Чтобы охватить широкий спектр клиентского оборудования, мы представляем две модели отслеживания позы: облегченную и полную, которые различаются по соотношению скорости и качества. Для оценки производительности CPU мы используем XNNPACK; для мобильных графических процессоров мы используем бэкэнд графического процессора TFLite.
Для оценки производительности CPU мы используем XNNPACK; для мобильных графических процессоров мы используем бэкэнд графического процессора TFLite.
Приложения
На основе позы человека мы можем создавать различные приложения, например фитнес-трекеры или трекеры йоги. В качестве примера мы приводим счетчики приседаний и отжиманий, которые могут автоматически подсчитывать статистику пользователей или проверять качество выполненных упражнений. Такие варианты использования могут быть реализованы либо с использованием дополнительной сети классификаторов, либо даже с помощью простого совместного попарного алгоритма поиска расстояния, который соответствует ближайшей позе в нормализованном пространстве поз.
| Счетчик количества выполненных упражнений на основе обнаруженной позы тела. Слева: приседаний; Вправо: Отжимания |
Заключение
Мы выпустили версию BlazePose, ориентированную на варианты использования верхней части тела в MediaPipe, работающие на Android, iOS и Python. BlazePose также будет доступен для более широкого сообщества мобильных разработчиков через API обнаружения поз в предстоящем выпуске ML Kit. Помимо мобильного домена, мы также просматриваем нашу веб-версию в браузере. Мы надеемся, что предоставление этой функции восприятия позы человека более широкому сообществу исследователей и разработчиков приведет к появлению творческих вариантов использования, стимулированию новых приложений и новым направлениям исследований.
BlazePose также будет доступен для более широкого сообщества мобильных разработчиков через API обнаружения поз в предстоящем выпуске ML Kit. Помимо мобильного домена, мы также просматриваем нашу веб-версию в браузере. Мы надеемся, что предоставление этой функции восприятия позы человека более широкому сообществу исследователей и разработчиков приведет к появлению творческих вариантов использования, стимулированию новых приложений и новым направлениям исследований.
Мы планируем расширить эту технологию с помощью более надежного и стабильного отслеживания для еще большего разнообразия человеческих поз и действий. В прилагаемой карточке модели мы подробно описываем предполагаемое использование, ограничения и справедливость модели, чтобы гарантировать, что использование этих моделей соответствует Принципам Google в области искусственного интеллекта. Мы считаем, что публикация этой технологии может дать толчок новым творческим идеям и приложениям со стороны членов исследовательского сообщества и сообщества разработчиков в целом. Мы очень рады видеть, что вы можете с его помощью построить!
Мы очень рады видеть, что вы можете с его помощью построить!
| Результаты BlazePose по сценариям использования йоги |
Благодарности
Особая благодарность всем членам нашей команды, которые работали с нами над технологией: Фан Чжан, Арциому Аблаватски, Юрию Картыннику, Тайлеру Жу, Картику Равендрану, Андрею Вакунову, Андрею Ткаченко, Марату Духану, Раману Сарленокину, Тайлеру Мулленокину Грегори Карпяк, Сурил Шах, Бак Бурдон, Цзюцян Тан, Мин Гуан Йонг, Чуо-Лин Чанг, Джухен Ли, Майкл Хейс, Камилло Лугареси, Эша Убоведжа, Сергей Казаку, Андрей Кулик, Мацвей Жданович и Матиас Грундманн.
| Fritz AI
Часть 2: Как работает оценка позы?
Теперь, когда мы немного знаем о том, что такое оценка позы, о различиях между разными типами оценки позы и о том, для чего ее можно использовать, давайте более подробно рассмотрим, как она работает.
Мы рассмотрим несколько подходов, основанных на машинном обучении, для оценки позы и оценим их преимущества и ограничения, сосредоточившись в первую очередь на нейронных сетях, которые стали самыми современными методами оценки позы.
Основные методы оценки позы
В общем, архитектуры глубокого обучения, подходящие для оценки позы, основаны на вариациях сверточных нейронных сетей (CNN). Для мягкого введения ознакомьтесь с этим руководством по сверточным нейронным сетям.
Есть два всеобъемлющих подхода: подход снизу вверх и подход сверху вниз .
При восходящем подходе модель обнаруживает каждый экземпляр определенной ключевой точки (например,грамм. все левые руки) на данном изображении, а затем пытается собрать группы ключевых точек в скелеты для различных объектов.
Нисходящий подход является обратным: сеть сначала использует детектор объектов, чтобы нарисовать рамку вокруг каждого экземпляра объекта, а затем оценивает ключевые точки в каждой обрезанной области.
Вверху: сравнение подходов снизу вверх и сверху вниз
И хотя мы уже упоминали об этом ранее, важно помнить о различии между 2D оценкой позы и 3D оценкой .Эти две задачи несут разные требования к данным, производят разные выходные данные (значения 2D пикселей по сравнению с пространственным расположением 3D) и обычно используются для решения разных проблем.
Базовая структура
Модели глубокого обучения для оценки позы бывают нескольких разновидностей, связанных с подходами сверху вниз и снизу вверх, описанными выше. Большинство из них начинают с кодировщика, который принимает изображение в качестве входных данных и извлекает признаки, используя серию сужающихся блоков свертки. Что будет после кодировщика, зависит от метода оценки позы.
Самый простой в концептуальном плане метод использует регрессор для вывода окончательных прогнозов местоположения каждой ключевой точки. Результирующая модель принимает изображение в качестве входных данных и выводит координаты X, Y и, возможно, Z для каждой ключевой точки, которую вы пытаетесь предсказать. Однако на практике эта архитектура не дает точных результатов без дополнительных доработок.
Однако на практике эта архитектура не дает точных результатов без дополнительных доработок.
Немного более сложный подход использует архитектуру кодер-декодер. Вместо непосредственной оценки координат ключевой точки кодер загружается в декодер, который создает тепловые карты, представляющие вероятность того, что ключевая точка будет найдена в данной области изображения.
Во время постобработки точные координаты ключевой точки находятся путем выбора местоположений тепловой карты с наибольшей вероятностью ключевой точки. В случае оценки нескольких поз тепловая карта может содержать несколько областей с высокой вероятностью ключевой точки (например, несколько правых рук на изображении). В этих случаях требуется дополнительная постобработка для присвоения каждой области конкретному экземпляру объекта.
Нисходящие подходы также используют архитектуру кодировщика-декодера для вывода тепловых карт, но они содержат дополнительный этап.Модуль обнаружения объекта помещается между кодером и декодером и используется для обрезки областей изображения, которые могут содержать объект. Затем тепловые карты ключевых точек прогнозируются индивидуально для каждого блока. Вместо того, чтобы иметь одну тепловую карту, содержащую вероятное расположение всех левых рук на изображении, мы получаем серию ограничивающих рамок, которые должны содержать только одну ключевую точку каждого типа. Такой подход позволяет легко назначать ключевые точки конкретным экземплярам без большой постобработки.
Затем тепловые карты ключевых точек прогнозируются индивидуально для каждого блока. Вместо того, чтобы иметь одну тепловую карту, содержащую вероятное расположение всех левых рук на изображении, мы получаем серию ограничивающих рамок, которые должны содержать только одну ключевую точку каждого типа. Такой подход позволяет легко назначать ключевые точки конкретным экземплярам без большой постобработки.
Оба типа архитектуры, рассмотренные до сих пор, в равной степени применимы к оценке позы 2D и 3D.Однако есть несколько вариантов, которые стоит упомянуть, которые относятся к оценке жесткой позы 3D. Вместо того, чтобы предсказывать координаты каждой ключевой точки в пространстве [X, Y, Z], вместо этого можно предсказать 6 степеней свободы объекта и применить преобразование к опорному каркасу. Например, вместо того, чтобы пытаться предсказать трехмерное положение верха бутылки с водой, вы должны спрогнозировать трехмерные координаты ее центра масс, а затем спрогнозировать вращение бутылки на изображении относительно опорной системы координат. Этот метод прогнозирования особенно полезен для приложений в AR, VR или других приложениях, которые используют программное обеспечение для 3D-рендеринга, такое как Unity. Однако обучение точным моделям может оказаться трудным.
Этот метод прогнозирования особенно полезен для приложений в AR, VR или других приложениях, которые используют программное обеспечение для 3D-рендеринга, такое как Unity. Однако обучение точным моделям может оказаться трудным.
Обзор архитектуры модели
Слишком много конкретных архитектур нейронных сетей, чтобы охватить их все здесь, но мы выделим несколько устойчивых и надежных, с которых можно начать.
Сети Stacked-Hourglass, Mask-RCNN и другие сети кодер-декодер
Чистые сети кодер-декодер принимают изображение в качестве входных и выходных тепловых карт для каждой ключевой точки.Это хорошее место для начала, если вы новичок в оценке нейронной позы. Если вам нужно определить несколько поз, Mask-RCNN — это универсальная архитектура, которая прогнозирует ограничивающие рамки для объектов на изображении, а затем прогнозирует позы в областях изображения, заключенных в рамку.
Вверху: многослойные сети песочных часов для оценки позы человека
PersonLab / PoseNet и OpenPose
OpenPose и PersonLab (также известные как PoseNet) — это варианты архитектуры кодировщика-декодера с изюминкой.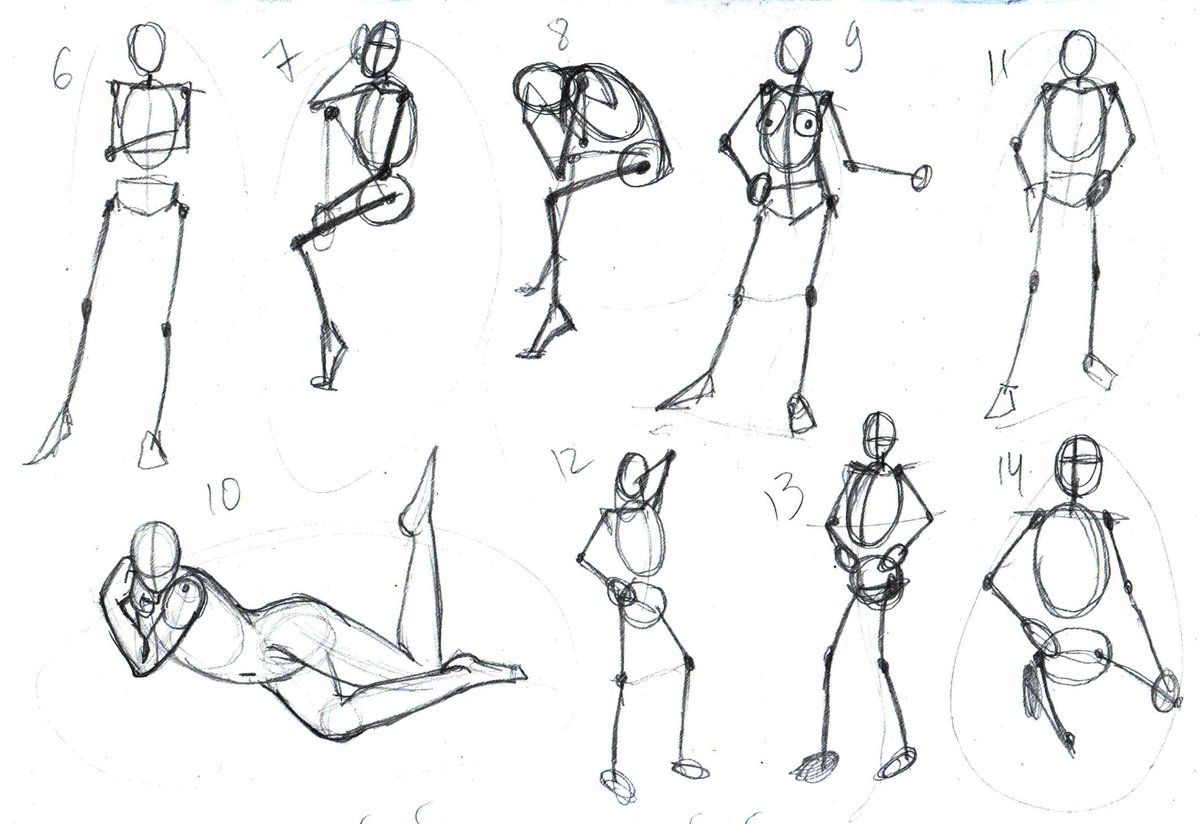 Помимо вывода тепловых карт, модель также выводит уточнения тепловых карт в виде коротких, средних и дальних смещений. Тепловые карты идентифицируют широкие области изображения, где может быть найдена ключевая точка, а смещения позволяют делать прогнозы в пределах области для более точного окончательного прогноза. Подробнее об архитектуре PoseNet, разработанной Google, и ее постобработке можно найти здесь.
Помимо вывода тепловых карт, модель также выводит уточнения тепловых карт в виде коротких, средних и дальних смещений. Тепловые карты идентифицируют широкие области изображения, где может быть найдена ключевая точка, а смещения позволяют делать прогнозы в пределах области для более точного окончательного прогноза. Подробнее об архитектуре PoseNet, разработанной Google, и ее постобработке можно найти здесь.
Машины сверточной позы
Машины сверточной позы основаны на архитектуре кодировщика-декодера путем итеративного уточнения прогнозов тепловой карты с использованием дополнительных сетевых слоев и извлечения признаков.Конечный результат представляет собой единый набор тепловых карт, а постобработка включает определение пикселей, для которых вероятность тепловой карты является максимальной для каждой ключевой точки.
Как работает оценка позы на краю
Если ваш вариант использования требует, чтобы оценка позы работала в реальном времени, без подключения к Интернету или с личными данными, вы можете подумать о запуске своей модели оценки позы непосредственно на пограничном устройстве, таком как мобильный телефон или доска IoT.
В таких случаях вам нужно будет выбрать архитектуру конкретной модели, чтобы обеспечить бесперебойную работу этих устройств с низким энергопотреблением.Вот несколько советов и приемов, которые помогут убедиться, что ваши модели готовы к развертыванию на периферии:
- Используйте для кодера архитектуры на основе MobileNet. Эта архитектура использует типы слоев, такие как разделимые по глубине свертки, которые требуют меньше параметров и меньше вычислений, но при этом обеспечивают высокую точность.
- Добавьте множитель ширины к вашей модели, чтобы вы могли настроить количество параметров в вашей сети в соответствии с вашими вычислениями и ограничениями памяти. Например, количество фильтров в сверточном слое сильно влияет на общий размер вашей модели.Многие документы и реализации с открытым исходным кодом будут рассматривать это число как фиксированную константу, но большинство этих моделей никогда не предназначались для мобильного или периферийного использования. Добавление параметра, который умножает базовое количество фильтров на постоянную долю, позволяет вам модулировать архитектуру модели в соответствии с ограничениями вашего устройства. Для некоторых задач вы можете создавать намного меньшие сети, которые работают так же хорошо, как и большие.
- Термоусадочные модели с квантованием, но будьте осторожны при падении точности.Квантование веса модели может сэкономить кучу места, часто уменьшая размер модели в 4 или более раз. Однако точность пострадает. Убедитесь, что вы тщательно тестируете квантованные модели, чтобы определить, соответствуют ли они вашим потребностям.
- Размеры ввода и вывода могут быть меньше, чем вы думаете! Если вы разрабатываете приложение для обучения, возникает соблазн подумать, что ваша модель оценки позы должна иметь возможность принимать в качестве входных данных видеокадры с полным разрешением. В большинстве случаев периферийным устройствам не хватает вычислительной мощности, чтобы справиться с этим.Вместо этого обычно обучаются модели оценки позы для получения изображений размером всего 224×224 пикселей.
Наверх
Оценка позы человека в 3D. Оценка позы человека широко… | Виктория Мазо | Заслуживает внимания
Оценка позы человека — широко исследуемая тема в глубоком обучении. Его основная идея — определять места суставов человека, которые образуют «скелет». Он имеет приложения для распознавания действий человека, захвата движения, забавных мобильных приложений, спорта, дополненной и виртуальной реальности, робототехники и т. Д.
Безмаркерное отслеживание тела Facebook для VR с одного датчикаВ 2D есть много моделей оценки позы с несколькими людьми с хорошей производительностью, описанных в этом блоге, многие из которых работают в реальном времени [1–4]. Существует два основных подхода: восходящий (сначала обнаружение суставов тела, а затем их группировка для получения позы человека) и нисходящий (сначала обнаружение людей и оценка позы одного человека для всех обнаружений). Наборы данных COCO и MPII в основном используются для двухмерных тестов.
Многопользовательская 2D-поза от OpenPose [3]Исследование 3D-позы человека менее развито по сравнению с 2D-случаем.Существует два основных подхода: сначала оценить двухмерную позу, а затем восстановить трехмерную позу или напрямую восстановить трехмерную позу. Исследования по оценке трехмерной позы нескольких людей в настоящее время несколько ограничены, в первую очередь из-за отсутствия хороших наборов данных. Большинство работ сообщают о результатах по набору данных Human3.6, который является основным набором данных для сравнения производительности 3D-поз одного человека. Он состоит из видео с несколькими экранами, на которых изображен один человек в комнате, поза которого запечатлена с помощью системы захвата движения OptiTrack.
Хотите прочитать эту историю позже? Сохраните его в журнале .
Большинство исследователей сосредотачиваются на воссоздании трехмерной позы из одного изображения, и лишь немногие из них смотрят в мультиэкране. Некоторые учитывают глубину в дополнение к изображению RGB. В большинстве работ рассматривается один кадр, а в немногих учитывается ограничение непрерывности во времени. Несмотря на то, что оценка трехмерной позы, как правило, требует больших вычислений, многие модели трехмерных поз создаются в реальном времени. Большинство моделей используют супервизию, но есть несколько моделей, которые являются частично контролируемыми или полностью самоуправляемыми.Несколько моделей с лучшими характеристиками будут описаны ниже более подробно.
В большинстве работ по оценке позы человека для одного человека используется одно изображение / видео. Несмотря на неоднозначность измерения глубины, модели, обученные на трехмерной наземной истине (GT), показывают довольно хорошую производительность для одного человека без окклюзии. Подобно людям, нейронная сеть может научиться предсказывать глубину из моно изображения, если она уже сталкивалась с подобными сценами, что продемонстрировано в недавнем исследовании оценки глубины.
Martinez’s et al. [5] Базовая модель , которая представляет собой полностью связанную сеть с остаточными соединениями, принимает в качестве входных данных 2D позу из стандартного современного 2D детектора [1–4] и прогнозирует 3D-поза с потерей регрессии из одного изображения. Интересно, что эта простая модель имеет довольно хорошие характеристики на Human3.6: среднее значение ошибки положения сустава (MPJPE) (протокол 1) составляет 63 мм . Поскольку сеть является легкой, если оценка 2D позы выполняется в реальном времени, полная модель также будет в реальном времени .
Базовая модель для трехмерной оценки позы человека, разработанная Martinez et al. [5].Zhou et al. [6] , с другой стороны, регрессирует и 2D, и 3D позы одновременно и достигает производительности, аналогичной Martinez: MPJPE 65 мм на Human3.6. Чжоу применяет общий подход к оценке двухмерной позы — сеть HourGlass [1], которая выводит тепловые карты для каждого сустава. Потери — это расстояние L2 между предсказанными тепловыми картами и GT, визуализированное через гауссово ядро. Глубина регрессирует напрямую.Кроме того, существует потеря трехмерных геометрических ограничений, основанная на том факте, что отношения между длинами костей остаются относительно фиксированными в человеческом скелете, что позволяет распространить оценки трехмерных поз на изображения в дикой природе. Модель в реальном времени (25 FPS на ноутбуке с Nvidia GTX 960).
Обзор сети Zhou et al. [6]Sun et al. [7] использует интегральную регрессию вместо регрессии L2 для совместной оценки позы 2D / 3D, которая представляет собой интеграцию всех местоположений на тепловой карте, взвешенных по их вероятностям.Он дифференцируемый, эффективный и совместим с любыми методами на основе тепловых карт. Поскольку интегральная регрессия является простой и непараметрической, она добавляет незначительные накладные расходы на вычисления и память, оставляя базовую модель реального времени на уровне в реальном времени , но повышая производительность. Авторы экспериментируют с несколькими магистралями: HourGlass [1] и Resnet18, 50 и 101. Интегральная регрессия с Resnet50 обеспечивает лучшую производительность на Human3.6: MPJPE 41 мм .
Обзор модели интегральной регрессии Sun et al.[7]Mehta’s et al. [8] VNect регрессирует совместно 2D и 3D положения суставов в соответствии с временным способом, применяя кинематическую подгонку скелета на основе модели. Чтобы прогнозирование позы 3D было более тесно связано с 2D внешним видом на изображении, формулировка 2D тепловой карты расширена до 3D с использованием трех дополнительных карт местоположения X j , Y j , Z j на стык j , а значения xj , yj и zj считываются с их соответствующих карт местоположения в положении максимума 2D тепловой карты H j соответствующего сустава.Потери регрессии L2 взвешиваются с помощью соответствующей 2D тепловой карты GT. VNect достигает 81 мм MPJPE на Human3.6 с ResNet50 в качестве основы. Это в реальном времени, : 30 кадров в секунду на Titan X.
Обзор VNect Мехта и др. [8]Pavllo et al. [9] начать с предсказанных 2D поз из HourGlass [1], Mask R-CNN [2] или CPN [4] из N кадров (и M просмотров только во время тренировки) в качестве входных данных для небольшого сеть с 1D расширенными временных сверток и предсказывает трехмерную позу либо для среднего (симметричные свертки), либо для следующего кадра (причинные свертки).Модель с магистралью CPN обеспечивает очень хорошие характеристики 47 мм MPJPE на Human3.6. Сверточная 1D-сеть крошечная и работает очень быстро, обеспечивая производительность в реальном времени и , учитывая, что основа 2D-поз находится в реальном времени.
Симметричная свертка времени в 2D позах Павлло и др. [9] Визуализация предсказания позы 3D на наборе данных Human3.6 Павлло и др. [9]Kocabas ’et al. [10] EpipolarPose делает вывод о трехмерном изображении из отдельных изображений, используя полностью самоконтролируемый подход , но он обучается с помощью многовидовых изображений.Сеть с магистралью ResNet50, предварительно обученная на наборе данных MPII, выводит объемные тепловые карты, из которых делается вывод о двухмерной позе для двух или более представлений. Псевдо-GT позы в 3D получается с помощью полиномиальной триангуляции, которая используется в качестве контрольного сигнала при плавных потерях L1. Модель использует суставы тела в качестве целей калибровки, когда внешние параметры камеры неизвестны, что часто бывает. EpipolarPose (с уточнением) достигает 61 мм MPJPE на Human3.6, что является отличным результатом для неконтролируемой модели.
EpipolarPose, обзор eKocabas et al. [10]Zimmermann et al. [11] использует в качестве входных моно изображений с глубиной из Kinnect и напрямую регрессирует 3D позу с помощью сверточной сети 3D . Поскольку в наборе данных Human3.6 нет измерения глубины, трудно сравнивать результаты сети. Для обучения авторы используют набор данных Multi View Kinnect.
Обзор сети Циммерманн и др. [11]Основная проблема при оценке позы в 3D для нескольких людей — это окклюзии.Вдобавок, к сожалению, почти не существует аннотированных наборов данных по 3D с несколькими людьми, таких как набор данных Human3.6. Большинство наборов данных с несколькими людьми либо не имеют хорошего GT, либо нереалистичны:
Пример реконструкции трехмерной позы с несколькими людьми и несколькими видами из набора данных Panoptic от Dong et al. [14]Mehta et al. [12] представляет однократную модель оценки позы с несколькими людьми на основе одного изображения. Авторы используют устойчивые к окклюзии позы (ORPM), которые позволяют сделать вывод позы всего тела даже при сильной частичной окклюзии другими людьми и объектами.ORPM выводит фиксированное количество карт, которые кодируют трехмерные совместные местоположения всех людей, а трехмерные позы для произвольного количества людей выводятся с использованием ассоциаций частей тела. Магистраль — Resnet50. Набор данных MuCo-3DHP используется для обучения, а MuPoTs-3D — для оценки с точностью обнаружения 70% (3DPCK в пределах 15-сантиметрового шара). Также сообщается о производительности на Human3.6: 70 мм MPJPE.
Обзор сети Mehta et al. [12]Rogez’s et al. [13] модель оценивает совместные 2D / 3D человеческие позы нескольких людей одновременно из одного изображения и имеет архитектуру локализации-классификации-регрессии (LCR-Net).Основным компонентом является генератор предложений позы, который предлагает позы кандидатов в разных местах изображения из 100 якорных поз, а классификатор оценивает различные предложения позы. Затем плавная регрессия L1 уточняет предложения по позе как в 2D, так и в 3D. Все три этапа используют сверточные векторные слои и обучаются совместно. Окончательная оценка позы получается путем интегрирования по соседним гипотезам позы. Модель оценивается на наборе данных MuPoTs-3D и сообщает о точности 74%.Также сообщается о производительности на Human3.6: 54 мм MPJPE.
Обзор LCR-Net ++ от Rogez et al. [13]Dong et al. [14] использует в качестве входных данных многовидовых изображений и оценивает первые двухмерные позы с несколькими людьми из CPN [4] в каждом ракурсе. Сопоставление обнаруженных лиц по нескольким представлениям выполняется путем расчета баллов сродства с использованием сходства внешнего вида (евклидово расстояние между дескрипторами из предварительно обученной сети повторной идентификации) и геометрической совместимости (межстрочного расстояния между суставом и соответствующей эпиполярной линией).Учитывая предполагаемые двухмерные позы одного и того же человека в разных ракурсах, трехмерную позу можно восстановить с помощью триангуляции, но грубые ошибки в двухмерной оценке позы могут в значительной степени ухудшить восстановление. Для того, чтобы полностью учесть неопределенности в оценке двухмерной позы и учесть структурную априорность человеческих скелетов, используется модель трехмерной изобразительной структуры (3DPS). Сообщенная производительность в наборе данных Campus составляет 96 процентов правильно оцененных деталей (PCP), а в наборе данных Shelf — 97 PCP. Набор данных Panoptic используется для качественной оценки.Это в реальном времени (без 3DPS) на GTX 1080Ti.
Обзор сети Донг и др. [14]Carraro et al. [15] оценить 3D-позы из многовидовых изображений с глубиной с откалиброванных камер Kinnect v2. Вход , в сеть — это двухмерные позы с несколькими людьми из OpenPose [3] для каждого вида, которые переводятся в трехмерные за счет включения информации о глубине. Затем изображения с нескольких камер объединяются с помощью нескольких фильтров Калмана без запаха.Авторы записали и аннотировали свой собственный набор данных. Модель работает в режиме реального времени .
Обзор сети Карраро и др. [15]Таким образом, оценка позы в 3D для одного человека на основе одного изображения достигла очень хороших результатов с погрешностью менее 4 см при оценке координат суставов в среднем. Тем не менее, есть еще много места для исследований в области трехмерной позы человека, поскольку отсутствует полное решение, которое является многопользовательским, многовидовым, согласованным во времени и в реальном времени.Есть намного больше работ по оценке позы в 3D, чем то, что я рассмотрел здесь, список которых можно найти здесь, здесь и здесь. Другие блоги об оценке позы человека можно найти здесь и здесь.
Ссылки:
[1] Newell et al. «Сложенные сети песочных часов для оценки позы человека» (2016), код
[2] He et al. «Маска R-CNN» (2017) код
[3] Cao et al. «OpenPose: двухмерная оценка позы для нескольких людей в реальном времени с использованием полей сродства частей» (2018), код
[4] Chen et al.«Сеть каскадных пирамид для оценки позы несколькими людьми» (2017), код
[5] Martinez et al. «Простая, но эффективная базовая линия для трехмерной оценки позы человека» (2017), код
[6] Zhou et al. «К трехмерной оценке позы человека в дикой природе: подход под слабым контролем» (2017), код
[7] Sun et al. «Интегральная регрессия позы человека» (2017), код
[8] Mehta et al. «VNect: 3D-оценка позы человека в реальном времени с помощью одной камеры RGB» (2017), код
[9] Павлло и др.«3D-оценка позы человека на видео с временными свертками и полу-контролируемым обучением» (2018), код
[10] Kocabas et al. «Самостоятельное изучение трехмерной позы человека с использованием геометрии с несколькими проекциями» (2019), код
[11] Циммерманн и др. «3D-оценка позы человека в изображениях RGBD для обучения робототехнике» (2018), код
[12] Mehta et al. «Однократная трехмерная оценка позы для нескольких людей с помощью монокулярной RGB-подсветки» (2017), код
[13] Rogez et al. «LCR-Net ++: Обнаружение двухмерных и трехмерных поз нескольких людей в естественных изображениях» (2018), код (LCR_Net)
[14] Dong et al.«Быстрая и надежная оценка позы в 3D с разных ракурсов» (2019) CVPR2019, код
[15] Carraro et al. «Оценка позы нескольких человек без маркеров в реальном времени в сетях камер с глубиной RGB» (2017), код
Emnolope / Human-Pose-Assessment-paper: Краткий обзор старых и новых статей о машинах для позирования с помощью камеры.
Код 😮
Arxiv 🤔 `
Позирующие машины развиваются с угрожающей скоростью. В основном вы делаете снимок / видео / датчик глубины кого-то и выясняете форму его тела! У него есть приложения в VR, медицине, автомобилестроении.Все вокруг полезно! Это репо предназначено для моих заметок об исследованиях и будет использоваться как место для сортировки новых исследовательских работ.
Примите участие
Напишите мне все, что вам интересно, просто оставьте вопрос, я не буду возражать.
Как это сортируется
Бумаги отсортированы по сезонам в целях здравомыслия. Более свежие статьи СТАНДАРТНЫ к тому, чтобы быть более продвинутыми, чем предыдущие, но я видел и это правило нарушенным. После сезона они сортируются по месяцам, а затем по первой букве аббревиатуры.Дата публикации ПЕРВАЯ версия. Это означает, что если бумагу дорабатывают 5 лет спустя, ей все равно 5 лет. У них также есть очень короткие и запоминающиеся мемо-описания. Они должны быть запоминающимися, яркими и описывать суть того, что отличает проект от других. «Моделирование человека с задействованием мышц» ПЛОХО »Скелет тряпичной куклы, положительный« ХОРОШО ».
Сезон бумаги
АКРОНИМ В КАЖДОМ БУКВЕ 📷📹🚪📦🍒 Смайлик с описанием калибра бумаги
Название статьи (Месяц и Год статьи) любой код, если присутствует
Краткое язвительное описание статьи для пятиклассников
- Качество
- 🍒 Хорошая бумага 💯👌🍎🍒🌠⭐🌟☄💎✅☑✔📟
- Измерение времени
- Пространственные размеры
- 🚪 Модели 2D
- 📦 3D Модели
- Физика
- 🏋 Физика Рэгдолл
- 🕺 Другой тип параметризованного кузова
- Надзор
- 👀 Под наблюдением
- 👓 Полукровный
Содержание
Проекты и доклады
Осень 2019
AWHFWSHPEFMRBG
Адаптивные песочные часы Вассерштейна для оценки положения руки под слабым контролем с помощью монокуляра RGB (сентябрь 2019 г.)
Позволяет использовать руки из видеоигр
CVFF3DHPE
Cross View Fusion для трехмерной оценки позы человека (сен 2019)
Дигитайзер Tron в прогрессивном формате JPEG, но есть несколько лазеров
FHADFMCOHPASFSRGBI
FreiHAND: набор данных для безмаркерной фиксации позы и формы руки из отдельных изображений RGB (сентябрь 2019 г.)
Буквально ручные модели
HSUSV3DHSPAHPEWHOIAPC
Holistic ++ Scene Understanding: однократный анализ трехмерной целостной сцены и оценка позы человека с взаимодействием человека и объекта и физическим здравым смыслом (сентябрь 2019 г.)
Парень возится с мебелью
ИЛФГЭС
Имитационное обучение для предсказания позы человека (сентябрь 2019 г.)
Научите живого манекена обезьяне видеть, как обезьяна делает с людьми, а затем используйте их как набросок, например GAN Swolebot
LVFUMI
Изучение визуальных функций при неизменности движения (сентябрь 2019 г.)
Возьмите маркер, переместите его к лицу и прочь, хорошо, теперь вращайте его, хорошо, теперь перетаскивайте его по столу.Тот же маркер? Хорошо.
ММЦНФАР
Мультимодальная трехпотоковая сеть для распознавания действий (сентябрь 2019 г.)
Три доли мозга, а не две
Лето 2019
BUHRNFMPPE
Восходящие сети с высоким разрешением для оценки позы нескольких человек (август 2019 г.)
Что происходит в голове действительно утонченного фетишиста на части тела
DKDFEPEIV
Динамическая дистилляция ядра для эффективной оценки позы в видео (август 2019 г.)
Использует предыдущее ядро как априор для следующего шага оценки.ТОЧНО, ЧТО ВЫ ХОТИТЕ СДЕЛАТЬ.
ECM3DCOHSHMUAEC
EventCap: Монокулярная 3D-съемка высокоскоростных движений человека с помощью камеры событий (август 2019 г.)
Они используют глазное яблоко, как камеру, ищут движение, а не яркость
HARFSP
Распознавание человеческой активности по позам скелета (август 2019)
Это скелет, играющий на тромбоне?
MMMEDFHA
MEx: набор данных мультимодальных упражнений для распознавания деятельности человека (август 2019 г.)
Набор данных камеры Kinect + контроллеры передач Samsung + коврик DDR
R3DHPAW3DC
Устранение неоднозначности позы человека в 3D с помощью ограничений 3D-сцены (август 2019 г.)
Сидеть на кушетке против погружения на кушетку.Ты не можешь утонуть в диване
САХПАСРУМВИ
Реконструкция позы и формы человека с учетом формы с использованием изображений с несколькими ракурсами (август 2019 г.)
Паппарази - толстый манекен в мешковатой одежде
ССМППМ
Одноступенчатые машины для позы для нескольких людей (август 2019)
Люди находят за один шаг с помощью корневого сустава
TSFFDVB3DHPE
Факторизация пространства траектории для оценки положения человека в 3D на основе глубокого видео (август 2019 г.)
Траектория пули через желе, TIME VISION
SMAHSAC 🍒📦🏋
Моделирование и управление масштабируемыми мышцами человека (июль 2019 г.) КОД
Swolebot: накиньте кучу мышц на скелет и заставьте его работать
TMGC 📟
На пути к захвату без маркеров (июль 2019 г.) КОД
Костлявая рука хватается за степлер
Весна 2019
ITWHPEUE2DFAI3DR
Оценка позы человека в дикой природе с использованием явных двухмерных характеристик и промежуточного трехмерного представления (апрель 2019 г.)
Это похоже на силлоут, но доп.Также какая-то ерунда с потерей репроекции.
M3DHPEBGAORH
Монокулярная 3D-оценка позы человека по поколениям и порядковый номер (апр 2019)
Научите кого-нибудь лепить фигурки из силлуэтов, чтобы вы могли делать фигурки из силлуэтов
SGCNF3DHPR 🍒
Сверточные сети семантических графов для трехмерной регрессии позы человека (апрель 2019 г.)
Он использует идеи, подобные паутине, вместо оконного экрана, такие как идеи, чтобы найти позу человека
SSNFHPE 🍒
Пространственная сеть быстрого доступа для оценки позы человека (апр 2019)
Как пазл, но твикер решает его и продолжает копаться во всем этом
V2GCCEFRWV
Vid2Game: управляемые персонажи, извлеченные из реальных видео (апрель 2019 г.)
Превращает людей в бумажные символы типа марио Использует позу2пози и позу2фрейм
DBDRD3DHPASFASCI 🍒
DenseBody: прямая регрессия плотной трехмерной позы и формы человека из одноцветного изображения (март 2019)
Давайте решим избавиться от посредника
DIAFFHPT
Плотный внутренний поток внешнего вида для передачи позы человека (март 2019)
Что происходит в сознании модельного фотографа, когда он видит декорации в студии.
KPTIPAFCFKSWDTIHP 🍒
KPTransfer: улучшенная производительность и более быстрая сходимость за счет переноса доменов подмножества ключевых точек при оценке позы человека (март 2019)
Различные режимы костюмов танцоров Light Balance
LCFTCCOT
Изучение корреспонденции по циклу-согласованности времени (март 2019)
буквально не использует ярлыков, не знает, что такое человек, Ходит вперед и назад по видео, чтобы помочь с предсказаниями Pleatau
PPCFEHPE
PifPaf: составные поля для оценки позы человека (март 2019)
Один для органов и один для тела, очень стандартный метод
TLFFHOIRAHPE
Turbo Learning Framework для распознавания взаимодействий человек-объект и оценки позы человека (март 2019)
WSDOGARF3DHPE 🍒
Слабо контролируемое открытие геометрического представления для трехмерной оценки позы человека (март 2019)
Зима 2018
CFAFHPE
Каскадное агрегирование признаков для оценки позы человека (февраль 2019 г.)
3DHPEFDMV2DP
3D-оценка позы человека из 2D-позы с глубоким многовидением (февраль 2019 г.)
DHRRLFHPE
Обучение глубокому представлению в высоком разрешении для оценки позы человека (февраль 2019 г.)
RNWSTOAARNFNF3DHPE
RepNet: обучение сети состязательной репроецирования для оценки позы человека под слабым контролем (февраль 2019 г.)
SSL3DHPUMVG 🍒
Самостоятельное изучение трехмерной позы человека с использованием многовидовой геометрии (февраль 2019 г.)
ATDATAHPEAT
Нисходящий подход к оценке и отслеживанию сформулированной позы человека (январь 2019 г.)
3ДHPMWSSL 🍒
3D-машины для позирования человека с самостоятельным обучением (январь 2019 г.)
Практически в реальном времени! 2д <-> 3д <-> 2д
HPEUMPAEM
Оценка позы человека с использованием приоров движения и ансамблевых моделей (январь 2019 г.)
HPEWSCI
Оценка позы человека с пространственной контекстной информацией (январь 2019)
VI3DHPE
Просмотр неизменной оценки позы человека в 3D (январь 2019 г.)
HPAPEFAVUDCS
Оценка позы и траектории человека из видео с воздуха с использованием динамического выбора классификатора (декабрь 2018 г.)
ПФМАГПРН 🍒
PoseFix: Общая сеть уточнения позы человека, не зависящая от модели (декабрь 2018 г.)
SFVRLOPSFV 📹📦🏋🍒📟
SFV: Обучение физическим навыкам с подкреплением из видео (декабрь 2018 г.)
Робот играет Саймона с группой людей: робот для брейк-данса
Осень 2018
D3DPEUPBP 📷📦
Оценка позы человека в глубоком 3D при частичном присутствии тела (октябрь 2018 г.)
Мне отрубили ноги и голову, но это всего лишь царапина.
3ДHPEUSOIRT 📷📦
Оценка позы человека в 3D с использованием стохастической оптимизации в реальном времени (октябрь 2018 г.)
Попробуйте снова и снова, пока не получите правильный ответ. Использует датчики глубины. RTW + Рой частиц
A3DHPEVMDS 📷📦
Состязательная трехмерная оценка позы человека с помощью мультимодального наблюдения за глубиной (сентябрь 2018 г.)
Продолжение работы ФБР, теперь есть мультимодальная сеть. IDK Что это значит
DLCMFHPE 📷🚪
Глубоко изученные композиционные модели для оценки поз человека (сентябрь 2018 г.)
Возьмите человеческое тело и засуньте его в блоки кода
DPT 🚪
Dense Pose Transfer (сен 2018)
цвет в манекене, машина представляет детали, затем оживляет бумажную статую
3DEPEVIL 📷📦
3D-оценка эго-позы с помощью имитационного обучения (сентябрь 2018 г.)
Headcam, они используют очень сложную тряпичную куклу, просто ходьба и бег
3DHPEWSEE 📷📦
Оценка позы человека в 3D с сиамским эквивалентным вложением (сентябрь 2018 г.)
Близнецы сравнивают свои ответы после выполнения домашнего задания по математике.(Домашнее задание относится к оценке 3-й позы)
TLARROHBH
На пути к изучению реалистичного изображения человеческого поведения (сентябрь 2018 г.)
Копирует позу одного человека на другой лист mario
SOAWVFT2018ECCVPTCO3DHPE 📷📦
Синтетическое усиление окклюзии с помощью объемных тепловых карт для конкурса ECCV PoseTrack Challenge 2018 по оценке позы человека в 3D (сентябрь 2018 г.)
Они блокируют свое лицо и тело дешевыми методами фотошопа, затем аппарат должен «просвечивать» все это.
Лето 2018
EDN
Everybody Dance Now (август 2018)
Генератор GAN
NBFUDLAMBHPASE 📷📦📟
Нейронная адаптация тела: объединение глубокого обучения и оценки позы и формы человека на основе моделей [КОД] (август 2018 г.)
Круг для оценки трехмерной позы. 2d изображение -> 2d Color Me Rad парень -> 3d пухлый мужчина -> фотография указанного человека -> 2d изображение
ВТВС
[Синтез видео в видео] (https: // tcwang0509.github.io/vid2vi (август 2018)
Генератор синтеза видео в видео 1 и дискриминатор 2, карта потока и постепенный рост
SSMP3DBPEFMRGBI 📷📦
Однократная оценка позы тела нескольких людей в 3D на основе входного сигнала RGB от монокуляра (август 2018 г.)
Они используют ORPM, что бы это ни значило. И у них есть несколько изображений с явно зеленым экраном.
M3DHPEUILSALSTMN
Оценка позы человека в мультиэкранном 3D-режиме с использованием улучшенных методов наименьших квадратов и сетей LSTM (июль 2018 г.)
Буквально именно то, что я пытаюсь построить КОПИЯ КОПИЯ КОПИЯ
RPI3DMSRARFMMC 📷📦
Переосмысление позы в 3D: многоступенчатое уточнение и восстановление для безмаркерного захвата движения (август 2018 г.)
используйте множество камер, чтобы улучшить хотя бы одну камеру, и делайте это снова и снова
AVUNFCAASG
Вариационная сеть U-Net для создания условного внешнего вида и формы (июнь 2018 г.)
В окружении фотографов
3ДHPEWRN 📷📦
Оценка позы человека в 3D с помощью реляционных сетей (июль 2018 г.)
Задняя кость соединена с плечевой костью, плечевая кость соединена с шейной костью...
HPEWPIL 🚪
Оценка позы человека с помощью учащегося, индуцированного синтаксическим анализом (июнь 2018 г.)
FBIPTBTGB2DIA3DHPUFOBI 📷📦
Поза ФБР: на пути к преодолению разрыва между 2D-изображениями и 3D-изображениями людей с использованием прямой или обратной информации (июнь 2018)
Сломанная согнутая нога Андерсона Сильвы
Весна 2018
DRP3DDRI3DHPE 📷📦
DRPose3D: Рейтинг глубины в оценке позы человека в 3D (май 2018 г.)
Эти парни работают в ФБР, но без аннотаций "краудсорсинг"
IARM3DHPEFWSD 📷📦
Все относительно: монокулярная 3D-оценка позы человека на основе данных под слабым контролем (май 2018 г.)
Аннотации относительной глубины из краудсорсинговых источников
BNVIO3DHBS 📦
BodyNet: Объемный вывод трехмерных форм человеческого тела [КОД] (апрель 2018 г.)
Сделайте статую микеаланджело в minecraft
UGARF3DHPE 📦📟
Неконтролируемое представление геометрии для трехмерной оценки позы человека [КОД] (апр 2018)
Он вращает человека глазами.(Вставьте сюда ссылку на раздевание с глазами)
MPCHPCFMV 📹📦
MonoPerfCap: захват действий человека из монокулярного видео [проект] (март 2018 г.)
делает вашу 3D-копию в виде полнофункциональной фигурки
TWHPEURS
Оценка позы человека через стену с помощью радиосигналов (18 июня)
Хорошо, это действительно волшебство, я не знаю, как описать его нахальный, например,
LTE3DHPASFASCI 📦
Обучение оценке позы и формы человека в 3D по одноцветному изображению (май 2018 г.)
Марка SMPL Манекен художника
3ДHPEINWBAL 📷📦
3D-оценка позы человека в дикой природе с помощью состязательного обучения (март 2018)
LCRNMP2DA3DPDINI 📹📦
LCR-Net ++: Обнаружение многопользовательских 2D и 3D поз в естественных изображениях [Проект] (март 2018 г.)
UALO3DHPF2DJL 📷📦
Неконтролируемое состязательное изучение трехмерной позы человека из двухмерных совместных локаций [страница проекта] (март 2018)
Зима 2017
ETEROHSAP 📹📦
Сквозное восстановление формы и позы человека [КОД] (декабрь 2017 г.)
ETIF3DHPE 📷📦
Использование временной информации для оценки позы человека в 3D (ноябрь 2017 г.)
Осень 2017
ECVMAC
Возникающая сложность через конкуренцию между несколькими агентами (октябрь 2017 г.)
Роботы для борьбы сумо
ASYEBF3DHPE
📷📦Простая, но эффективная базовая линия для оценки позы человека в 3D (август 2017 г.) [CODE]
RMP2DPEUPAF
📹🚪 Оценка позы в режиме реального времени для нескольких людей с использованием полей сродства частей [КОД] (апрель 2017 г.)
DLDLSUHDRL
DeepLoco: навыки динамического передвижения с использованием иерархического обучения с глубоким подкреплением (июль 2017 г.)
Brains and Brawn, двухуровневая архитектура
EOLBIRE
Появление двигательного поведения в богатой среде (июль 2017 г.)
Фигурка, занимающаяся паркуром, Deepmind
APNASACNFHPE
📷🚪Состязательная PoseNet: сверточная сеть с учетом структуры для оценки позы человека (май 2017 г.)
VNRT3DHPEWASRGBC
📹📦VNect: 3D-оценка позы человека в реальном времени с помощью одной камеры RGB [ПАРОЛЬ] [Проект] (июль 2017 г.)
LFTDC3DPEFASI
📷📦Подъем из глубин: сверточная оценка позы в 3D по одному изображению (октябрь 2017 г.)
KGDFNNFHPE 📷📦
Глубокие фрактальные нейронные сети на основе знаний для оценки поз человека [КОД] (август 2017 г.)
2016
LTF2DA3DICFMBPE 📷📦
Обучение сочетанию сигналов 2D и 3D изображений для оценки позы тела монокуляра (ноябрь 2016 г.)
M3DHPEITWUICNS 📷📦
Монокулярная 3D-оценка позы человека в дикой природе с использованием улучшенного наблюдения CNN [Проект] (ноябрь 2016 г.)
MCGDAF3DPEITW 📷📦
MoCap-управляемое расширение данных для 3D-оценки позы в дикой природе (октябрь 2016 г.)
3DHPEUCNNW2DPI
3D-оценка позы человека с использованием сверточных нейронных сетей с 2D-информацией по позе (сентябрь 2016 г.)
KISAEO3DHPASFASI 📷📦
Keep it SMPL: автоматическая оценка трехмерной позы и формы человека на основе одного изображения (июль 2016 г.)
PFNNFCC
Фазовые нейронные сети для управления персонажами (апр 2017)
Левая правая, левая правая, но для персонажей видеоигр
TALSUDRL
Навыки передвижения, адаптированные к местности, с использованием глубокого обучения с подкреплением
Двуногий ходок открытого ИИ.Как Курибо на двух палочках для еды
ШНФХПЭ 📷🚪
Наборных сетей «песочные часы» для оценки позы человека [КОД] (март 2016)
Цена в минуту 📷🚪
Сверточные позы [КОД] (янв 2016)
2014 и 2015
STMFHPE 📹📦
Пространственно-временное сопоставление для оценки позы человека [проект] (декабрь 2015 г.)
SPD3DHPEFMV 📹📦
Редкость встречает глубину: 3D-оценка позы человека из монокулярного видео [проект] (ноябрь 2015 г.)
FMBLFBC
Гибкое движение на основе мышц для двуногих существ (13 ноября)
Часы my girrafe sway
DOCBTCIO
Обнаружение сложных моделей поведения с помощью контактно-инвариантной оптимизации (июль 2012 г.)
Персонажи «Время приключений» помогают друг другу
Наборы данных
Наборы данных
MS COCO 2d сегментации объектов ПОЛУЧИТЬ
MPI-INF-3DHP ПОЛУЧИТЬ
MPII POSE 2D-фрагменты видео GET SOME
Человек 3.6М 3D поза с 4 камерами и TOF. Бонусные синтетические данные. БОГ ВЫ
HumanEva-I Маленькие 3D-видео позы. ПОЛУЧИТЬ
СЮРРЕАЛЬНЫХ персонажей видеоигр вставлено наугад ПОЛУЧИТЬ НЕКОТОРЫЕ
mXE 3D-поза с давлением, камерой и kinect ПОЛУЧИТЬ НЕКОТОРЫЕ
VGG HPE Верхняя часть корпуса ПОЛУЧИТЬ
CMU Panoptic Studio Camera сфера, трехмерная поза, видео и облака точек ПОЛУЧИТЬ
UP-3D / Unite The People 3D-поза, тоже хорошо ПОЛУЧИ
LIP Посмотрите в лицо, ПОЛУЧИТЕ
Создание изображения человека с управлением по позе [КОД] — Ма, Л., Jia, X., Sun, Q., Schiele, B., Tuytelaars, T., & Gool, L.V. (НИПС 2017)
Генеративная модель людей в одежде — Lassner, C., Pons-Moll, G., & Gehler, P.V. (ICCV 2017)
Деформируемые сети GAN для создания изображений человека на основе позы — [КОД] — Сиарохин, А., Сангинето, Э., Латюильер, С., и Себе, Н. (CVPR 2018)
Передача плотной позы — Неверова, Н., Гулер, Р.А., и Коккинос, И. (ECCV 2018)
Генеративная модель людей в одежде
Деформируемые GAN для создания изображений человека на основе позы в
Передача плотной позы
Направляющая
Распознавание жестов и языка жестов с помощью глубокого обучения
Оценка позы человека 101
Боб
Джесси
Превосходно
HoreFice
Мои личные цели:
Я хочу найти проект, который можно клонировать.
Я бы хотел найти недавний проект.
Я бы хотел найти проект с выполненной 3d работой
Я бы хотел найти проект, который можно интегрировать со SteamVR. (расположение костей вместо капель / сеток)
современный двухмерный детектор позы, это очень важно.
Этот двухмерный детектор позы может возвращать цветные конечности, соответствующие каждой части тела, или тепловые карты, соответствующие суставу, или даже прямую / обратную информацию из аннотации.
Зависимость от времени, в идеале сеть, при выполнении пикселя в 2d позу и 2d позы на 3D карту и 3D карту в скелет следует учитывать предыдущий кадр и с внутренним представлением граничных условий позы человеческого тела (возможно, GAN ?)
Кроме того, можно использовать и другие уловки, например сиамский сетевой параллелизм. Когда два выстрела одной и той же позы награждаются за одинаковый результат. Можно использовать физическое моделирование механики тела.Перепроецирование трехмерных суставов обратно в двухмерную геометрию с использованием сеток. Трехмерную позу можно итеративно улучшать снова и снова. Синтетические данные, созданные на основе игровых данных. Дополнительно должна быть стандартизирована 3д поза. Кроме того, следует хорошо выполнить 2-ю позу.
Это здесь специально, чтобы НЕ находить их снова, пожалуйста, не удаляйте их. Храните их в хронологическом порядке.
DTF3DPEFCIWMA Перенос домена для оценки позы в 3D по цветным изображениям без ручных аннотаций (октябрь 2018 г.) Не имеет отношения, но здесь можно позировать рукой, так что я думаю, что это вроде CADSTNFHPEFDI Контекстно-зависимая глубокая пространственно-временная сеть для оценки положения руки по изображениям глубины (октябрь 2018 г.) Не имеет значения, оценка позы руки CPNF3DHPEC На самом деле я собираюсь засунуть это в верхнюю часть, для конкретной цели, чтобы быть типичным
Сеть каскадных пирамид для задачи оценки позы человека в 3D (октябрь 2018 г.) Сверху вниз, кажется довольно типичным, здесь ничего особенного не происходит DT3DROHB Трехмерная реконструкция человеческих тел с глубокой текстурой [проект] (сентябрь 2018 г.) Не актуально.Я сделаю вам копию из сырой глины. Тренировка глубины, регулярные тесты камеры HCRNFHPE Иерархические сети уточнения контекста для оценки позы человека (октябрь 2018 г.) Вы начинаете со своего центра и развиваете вовне FAMPHMCFVRA Полностью автоматический захват движения человека несколькими людьми для приложений виртуальной реальности (сентябрь 2018 г.) $$$ Устройте вечеринку, превратите всех своих друзей в скелетов, и они уйдут PL3DPEBOJI Распространение LSTM: 3D-оценка позы на основе совместной взаимозависимости (сентябрь 2018 г.) HPEAARUCNTIH [Оценка хоккейной позы и распознавание действий с использованием сверточных нейронных сетей для хоккея с шайбой] [https: // uwspace.uwaterloo.ca/handle/10012/13835] (сентябрь 2018 г.) HPEMBOSDI Метод оценки позы человека на основе одного изображения глубины (сентябрь 2018 г.) LRFALRFSV3DPEOHAO Изучение надежных функций и скрытых представлений для оценки позы людей и объектов в едином представлении (сентябрь 2018 г.) AROFHPEFSI Обзор оценки позы человека по одному изображению (июль 2018 г.) 3DHPEOTS Оценка позы человека в 3D в последовательности тайцзи (июль 2018 г.) MoCap и новый набор биомедицинских данных! HPEBODNN Оценка позы человека на основе глубокой нейронной сети (июль 2018 г.) MVCNNF3DHPE Многоканальные CNN для трехмерной оценки позы рук (июль 2018 г.) Многие люди смотрят на твою руку MV3DHPEUILSALSTMN Оценка позы человека в многоэкранном режиме в 3D с использованием улучшенных методов наименьших квадратов и сетей LSTM (июль 2018 г.) LSTM 3DROHBSFASCDC Трехмерная реконструкция формы человеческого тела с помощью одной товарной глубинной камеры (июнь 2018 г.) HPACP3DHPEWMUAUC Поза человека как образец для калибровки; Оценка позы человека в 3D с помощью нескольких несинхронизированных и некалиброванных камер (июнь 2018 г.) SDHNFHPE Составные сети плотных песочных часов для оценки позы человека (апрель 2018 г.) SBFHPEAT Простые базовые параметры для оценки и отслеживания позы человека [КОД] (апр 2018) AGAFMV3DHPR Обобщенный подход для регрессии позы человека в 3D с несколькими проекциями (апрель 2018 г.) ADLBMF3DHPEF2DFEI Основанный на глубоком обучении метод оценки позы человека в 3D по 2D-изображениям «рыбий глаз» (март 2018 г.) Унифицированная структура для оценки положения объекта с несколькими классами и несколькими классами (март 2018 г.) Изучение оценки позы человека с помощью монокуляра в 3D на основе изображений в нескольких проекциях (март 2018 г.) Многомасштабная сеть структурного анализа для оценки поз человека (март 2018 г.) Mo2Cap2: мобильный 3D-захват движения в реальном времени с установленной на крышке камерой «рыбий глаз» (март 2018 г.) Иерархическая графическая оценка позы человека с помощью локальной сверточной нейронной сети с несколькими разрешениями (февраль 2018 г.) Синтез на основе изображений для глубокой 3D оценки позы человека (февраль 2018 г.) LSTM Pose Machines [КОД] (декабрь 2017 г.) Однократная оценка позы для нескольких людей с помощью монокуляра RGB (декабрь 2017 г.) Использование одного кадра RGB для оценки позы руки в режиме реального времени в дикой природе (декабрь 2017 г.) Изучение трехмерной позы человека по структуре и движению (ноябрь 2017 г.) Интегральная регрессия позы человека [КОД] (ноябрь 2017 г.) Поиск позы человека для коллекций изображений и видео (октябрь 2017 г.) Поисковая система танцоров Оценка позы человека с использованием глобальной и локальной нормализации (сентябрь 2017 г.) Пирамиды функций обучения для оценки позы человека [КОД] (август 2017 г.) Повторяющиеся 3D-машины последовательности позы (июль 2017 г.) Самостоятельная тренировка по оценке поз человека [CODE1] [CODE2] (июль 2017 г.) Изучение моделей поз человека на основе синтезированных данных для надежного распознавания действий RGB-D (июль 2017 г.) Выравнивание лица быстрее, чем в реальном времени: подход сети трехмерного пространственного преобразователя в неограниченных позах (июль 2017 г.) [Подход с двумя источниками для трехмерной оценки позы человека по одному изображению] (https: // arxiv.org / pdf / 1705.02883.pdf) (май 2017 г.) К трехмерной оценке позы человека в дикой природе: подход под слабым контролем [КОД] (апрель 2017 г.) Adversarial PoseNet: сверточная сеть с учетом структуры для оценки поз человека (апр 2017 г.) Прогнозирование динамики человека на основе статических изображений (апрель 2017 г.) 📦 Композиционная регрессия позы человека (апр 2017 г.) Условные случайные поля на основе согласованности двухмерных и трехмерных поз для трехмерной оценки позы человека (апрель 2017 г.) Многоконтекстное внимание для оценки позы человека — [CODE] (февраль 2017 г.) Подъем из глубины: оценка сверточной трехмерной позы на основе одного изображения (январь 2017 г.) На пути к точной оценке поз для нескольких людей в дикой природе [КОД] (январь 2017 г.) Подъем из глубины: оценка сверточной трехмерной позы на основе одного изображения (январь 2017 г.) Учимся у синтетических людей (январь 2017 г.) MonoCap: Монокулярный захват движения человека с использованием CNN в сочетании с геометрическим приором (январь 2017 г.) RMPE: региональная оценка позы для нескольких человек [CODE1] [CODE2] (декабрь 2016 г.) Прогнозирование объема от грубого к точному для трехмерной позы человека с одним изображением [КОД] (ноябрь 2016 г.) Двухмерная оценка позы для нескольких людей в реальном времени с использованием полей сродства деталей [КОД] (ноябрь 2016 г.) Оценка позы человека в 3D на основе одного изображения с помощью матричной регрессии (ноябрь 2016 г.) Изучение точки обзора камеры с помощью CNN для улучшения оценки трехмерной позы тела (сентябрь 2016 г.) EgoCap: эгоцентрический безмаркерный захват движения с двумя камерами «рыбий глаз» (сентябрь 2016 г.) Структурированное прогнозирование трехмерной позы человека с помощью глубоких нейронных сетей (май 2016 г.) DeeperCut: более глубокая, сильная и быстрая модель оценки позы для нескольких человек [CODE1] [CODE2] (май 2016 г.) Повторяющаяся оценка позы человека [КОД] (май 2016 г.) Синтез тренировочных изображений для улучшения оценки позы человека в 3D (апрель 2016 г.) Видеть невидимые позы: оценка трехмерной позы тела из эгоцентрического видео — совершенно безумие и выходит за рамки науки (март 2016 г.) DeepCut: совместное разделение подмножеств и маркировка для оценки позы нескольких человек [КОД] (ноябрь 2015 г.) Подход с двумя источниками для трехмерной оценки позы на основе одного изображения (сентябрь 2015 г.) Оценка позы человека с итеративной обратной связью об ошибках [CODE] (июль 2015 г.) Плавные сети для оценки позы человека в видеороликах [CODE] (июнь 2015 г.) Оценка позы человека в 3D по изображениям монокуляра с помощью глубокой сверточной нейронной сети (ноябрь 2014 г.) Эффективная локализация объектов с использованием сверточных сетей (ноябрь 2014 г.) MoDeep: структура глубокого обучения с использованием функций движения для оценки позы человека (сентябрь 2014 г.) Совместное обучение сверточной сети и графической модели для оценки позы человека [CODE] (июнь 2014 г.) Изучение функций оценки позы человека с помощью сверточных сетей (декабрь 2013 г.) DeepPose: оценка позы человека с помощью глубоких нейронных сетей (декабрь 2013 г.) Словарь позы Deep 3D: оценка позы человека в 3D из одного изображения RGB с использованием глубокой сверточной нейронной сети Трехмерное отслеживание позы руки по изображениям глубины с использованием глубокого обучения с подкреплением 3D-реконструкция и идентификация человека с помощью сенсора Kinect (август 2018 г.) Low-fi body ID 3D-оценка позы головы с использованием тензорной декомпозиции и нелинейного моделирования многообразия (сентябрь 2018 г.) Подход на основе данных для трехмерной реконструкции позы человеческого тела с помощью сенсора Kinect Обнаружение случайного падения на основе анализа позы и SVDD $$$ Глобальное обучение с использованием области человеческого тела с целью повторной идентификации человека (ноябрь 2018 г.) ЧЕЛОВЕЧЕСКАЯ ОЦЕНКА ПОЗЫ В ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ
(Июн 2018) Заполнение суставов: завершение и восстановление неполных трехмерных поз человека (июнь 2018 г.) Адаптация MobileNets для мобильной оценки позы верхней части тела Октябрь 2018 г. Быстрый боксер Трехмерная оценка позы человека с помощью двухмерных предельных тепловых карт
Оценка позы человека с использованием глубокого обучения в OpenCV — CV-Tricks.com
Недавно я наткнулся на очень интересный пример использования компьютерного зрения и искусственного интеллекта.
Runners Need — британский бренд спортивной обуви. Они предлагают автоматический анализ походки с использованием компьютерного зрения, прежде чем продать вам индивидуальную обувь.
Анализ походки — это метод выявления биомеханических отклонений в вашей походке или беге. Система видеоаналитики оценивает, как ваша ступня касается пола, и определяет, катится ли ваша ступня внутрь (пронаты), недостаточно ли перекатывается внутрь (перекатывается / супинается) или остается нейтральной.Он показывает, как ваше тело распределяет воздействие. Многие люди излишне прогибаются, то есть, когда ступня стоит на полу, она чрезмерно скатывается внутрь, перенося вес на внутренний край, а не центрируя его на подушечке стопы.
Сначала пользователя просят бегать на беговой дорожке в нейтральной обуви, за которой система видеоаналитики наблюдает в течение 20 секунд. На основании этого система определяет вашу походку и рекомендует подходящую обувь. Эта система использует технику компьютерного зрения, называемую оценкой позы человека.
В сегодняшнем посте мы узнаем об оценке позы человека на основе глубокого обучения с использованием библиотеки OpenPose с открытым исходным кодом. OpenPose — это библиотека для обнаружения ключевых точек в реальном времени и многопоточности, написанная на C ++ с доступной оболочкой python. OpenPose выиграл испытание coco keypoint Challenge 2016 года. OpenCV интегрировал OpenPose в свой новый модуль Deep Neural Network (DNN). Это будет означать, что для запуска этого кода вам потребуется OpenCV версии 3.4.1 или выше. Мы также поделимся полным кодом для оценки позы человека в OpenCV.
Оценка позы человека:
Проблема оценки позы человека может быть определена как методы компьютерного зрения, которые предсказывают расположение различных ключевых точек человека (суставов и ориентиров), таких как локти, колени, шея, плечо, бедра, грудь и т. Д.
Это очень сложная проблема из-за различных факторов, таких как маленькие и малозаметные части, окклюзии и огромная вариабельность суставов. На рисунке ниже показаны проблемы:
Эти изображения имеют суставы в различных сочленениях.Также не видны некоторые стыки. Например, на левом изображении мы можем предсказать руки только потому, что понимаем контекст и можем сформулировать движение и положение человека.
OpenPose:
Проект openPose Университета Карнеги-Меллона — один из самых точных методов оценки позы человека. Этот подход, основанный на сверточной нейронной сети, решает проблему с помощью многоступенчатого классификатора, в котором каждый этап улучшает результаты предыдущего.
Первый этап берет входное изображение и прогнозирует возможные местоположения каждой ключевой точки на изображении с помощью показателя достоверности (называемого картой достоверности).
На первом этапе берется входное изображение и создается карта достоверности для всех ключевых точек. На этом изображении мы показываем карту достоверности после первого этапа для правого локтя. Выделенная часть с большой вероятностью может оказаться правым локтем.
На каждом последующем этапе используются не только данные изображения, но и карта достоверности предыдущего этапа, чтобы использовать контекст близлежащей области из предыдущего этапа.Это улучшает прогноз после каждого шага, то есть карта достоверности становится более точной после прохождения всех 4 этапов.
Карта достоверности хороша для оценки позы одного человека. Однако авторы попытались построить решение для общей оценки позы человека с несколькими людьми. Оценка позы человека с участием нескольких людей связана с множеством дополнительных проблем, таких как неизвестное количество людей на изображении, окклюзия, изменение масштаба людей. Используя уверенность, вы можете создать только все ключевые точки, как показано на изображении ниже:
При оценке позы нескольких человек перекрывающиеся части тела представляют проблему однозначной идентификации конечностей каждого человека.
Итак, авторы ввели идею частичных карт сходства. Он использует тот факт, что определенные суставы прикреплены через конечности, поэтому вводится еще одна ветвь cnn, которая предсказывает 2D векторные поля, называемые картами сродства частей (PAF). PAF кодирует расположение и ориентацию конечностей.
Позже мы можем использовать направление карт сродства частей для точного прогнозирования позы людей в задаче оценки позы нескольких людей. Теперь, на последнем этапе, мы можем просто соединить эти точки, используя жадный вывод, чтобы сгенерировать ключевые точки позы для всех людей на изображении.Сначала определяется соединение для одного типа конечностей человека, а затем повторяется для других типов конечностей.
Сначала соединяются конечности одного типа, а затем это повторяется для других видов конечностей.
Итак, мы используем архитектуру сверточной нейронной сети с двумя ветвями.
Более конкретно:
Итак, есть три шага:
- Локализация ключевых точек : Одна ветвь сети отвечает за прогнозирование всех ключевых точек с помощью оценки достоверности.Это называется картой уверенности.
- Поля сродства частей : Другая ветвь сети предсказывает двумерное векторное поле, которое предсказывает данные ассоциации ключевых точек.
- Жадный вывод : Теперь мы соединяем все ключевые точки с помощью жадного вывода.
Код оценки позы одного человека в OpenCV:
В сегодняшнем посте мы будем запускать оценку позы только одного человека с использованием OpenCV. Сейчас мы просто покажем карты уверенности, чтобы показать ключевые точки.Чтобы не усложнять этот пост, на следующей неделе мы покажем, как связать ключевые точки нескольких людей с помощью карт сродства позы. Мы будем использовать предварительно обученную модель, обученную командой OpenPose с использованием Caffe в наборе данных MPI. В этом наборе данных есть 15 ключевых точек для идентификации различных точек человеческого тела.
«Голова»: 0, «Шея»: 1, «Плечо»: 2, «Передний локоть»: 3, «Правое запястье»: 4, «LShoulder»: 5, «LElbow»: 6, «LWrist»: 7, «RHip»: 8, «RKnee»: 9, «RAnkle»: 10, «LHip»: 11, «LKnee»: 12, «LAnkle»: 13, «Chest»: 14, «Фон»: 15
«Голова»: 0, «Шея»: 1, «Плечо»: 2, «RElbow»: 3, «RWrist»: 4, «LShoulder»: 5, «LElbow»: 6, «LWrist «: 7,« RHip »: 8,« RKnee »: 9, « RAnkle »: 10,« LHip »: 11,« LKnee »: 12,« LAnkle »: 13,« Chest »: 14, «Фон»: 15 |
Мы также определяем пары поз, определяющие конечности.Это используется для создания конечностей, которые соединяют ключевые точки, а карты сродства позы используются для прогнозирования конечностей.
POSE_PAIRS = [[«Голова», «Шея»], [«Шея», «Плечо»], [«Плечо», «Плечо»], [«RElbow», «RWrist»], [«Шея», «LShoulder»], [«LShoulder», «LElbow»], [«Lлокоть», «LWrist»], [«Шея», «Грудь»], [«Грудь», «RHip»], [«RHip», «RKnee»], [«RKnee», «RAnkle»], [«Chest», «LHip»], [«LHip», «LKnee»], [«LKnee», «LAnkle»]]
POSE_PAIRS = [[«Голова», «Шея»], [«Шея», «Плечо»], [«Плечо», «RElbow»], [«RElbow», «RWrist»], [ «Шея», «LShoulder»], [«LShoulder», «LElbow»], [«LElbow», «LWrist»], [«Шея», «Chest»], [«Chest», «RHip»] , [«RHip», «RKnee»], [«RKnee», «RAnkle»], [«Chest», «LHip»], [«LHip», «LKnee»], [«LKnee», «LAnkle» «]] |
Вот как мы можем скачать модели:
OPENPOSE_URL = «http: // Posefs1.perception.cs.cmu.edu/OpenPose/models/ » POSE_FOLDER = «поза /» MPI_FOLDER = $ {POSE_FOLDER} «mpi /» MPI_MODEL = $ {MPI_FOLDER} «Pose_iter_160000.caffemodel» wget -c $ {OPENPOSE_URL} $ {MPI_MODEL} -P $ {MPI_FOLDER}
OPENPOSE_URL = «http://posefs1.perception.cs.cmu.edu/OpenPose/models/» POSE_FOLDER = «position /» MPI_FOLDER = $ {POSE_FOLDER} pipipi, m m MPI_MODEL = $ {MPI_FOLDER} «Pose_iter_160000.caffemodel «wget -c $ {OPENPOSE_URL} $ {MPI_MODEL} -P $ {MPI_FOLDER} |
Сначала давайте прочитаем сетевой граф (файл .prototxt) и загрузим предварительно обученные веса в сеть.
net = cv.dnn.readNetFromCaffe (args.proto, args.model)
net = cv.dnn.readNetFromCaffe (args.proto, args.model) |
Теперь следующий шаг — загрузить изображения в пакете и прогнать их по сети.Для этого мы используем метод cv2.dnn.blobFromImage. Этот метод создает 4-мерный blob из входных изображений. Давайте посмотрим на сигнатуру этого метода:
blob = cv.dnn.blobFromImage (изображение, коэффициент масштабирования, размер, среднее значение, swapRB, обрезка)
Где:
image : это входное изображение, которое мы хотим отправить в нейронную сеть для вывода.
scalefactor : если мы хотим масштабировать наши изображения, умножая их на постоянное число.Часто мы делим все наши изображения uint8 на 255, таким образом, все пиксели находятся между 0 и 1 (0 / 255-255 / 255). Значение по умолчанию — 1.0, без масштабирования.
размер : пространственный размер выходного изображения. Он будет равен размеру ввода, необходимому для последующих нейронных сетей в качестве вывода blobFromImage.
swapRB : логическое значение, указывающее, хотим ли мы поменять местами первый и последний канал в трехканальном изображении. OpenCV предполагает, что изображения по умолчанию находятся в формате BGR, но если мы хотим поменять этот порядок на RGB, мы можем установить для этого флага значение True, что также является значением по умолчанию.
среднее значение : чтобы обрабатывать вариации интенсивности и нормализацию, иногда мы вычисляем среднее значение пикселя в наборе обучающих данных и вычитаем его из каждого изображения во время обучения. Если во время обучения мы выполняем среднее вычитание, то мы должны применять его во время вывода. Это среднее значение будет кортежем, соответствующим каналам R, G, B. Например, средние значения в наборе данных Imagenet составляют R = 103,93, G = 116,77 и B = 123,68. Если мы используем swapRB = False, то этот порядок будет (B, G, R).
crop : логический флаг, указывающий, хотим ли мы обрезать изображения по центру. Если установлено значение True, входное изображение обрезается от центра таким образом, чтобы меньший размер был равен соответствующему размеру, а другой размер был равен или больше. Однако, если мы установим его в False, он сохранит соотношение сторон и просто изменит размер до размеров.
В данном случае:
inp = cv.dnn.blobFromImage (кадр, 1.0 / 255, (inWidth, inHeight), (0, 0, 0), swapRB = False, обрезка = False) сеть.setInput (вход)
inp = cv.dnn.blobFromImage (frame, 1.0 / 255, (inWidth, inHeight), (0, 0, 0), swapRB = False, crop = False) net.setInput (inp) |
Теперь нам просто нужно вызвать функцию пересылки, которая будет выполнять логический вывод для входного изображения.
Это сгенерирует карту достоверности для каждой ключевой точки (части тела), которую можно соединить с помощью карт привязки позы.Однако, чтобы не усложнять задачу, мы не будем использовать карты сродства позы, а просто возьмем глобальные максимумы этих карт уверенности для каждой ключевой точки. Это немного повлияет на наши результаты, но будет хорошо работать в большинстве случаев для обнаружения ключевой точки одного человека.
для i в диапазоне (len (BODY_PARTS)): # Срезать тепловую карту соответствующей части тела. heatMap = out [0, i,:,:] # Изначально мы пытаемся найти все локальные максимумы. Чтобы упростить образец # мы просто находим глобальный.Однако только одна поза одновременно # могли быть обнаружены таким образом. _, conf, _, point = cv.minMaxLoc (heatMap) x = (frameWidth * точка [0]) / out.shape [3] y = (frameHeight * point [1]) / out.shape [2] # Добавить балл, если уверенность выше порога. points.append ((int (x), int (y)) if conf> args.thr else None)
for i in range (len (BODY_PARTS)): # Тепловая карта среза соответствующей части тела. heatMap = out [0, i,:,:] # Изначально мы пытаемся найти все локальные максимумы. Чтобы упростить пример #, мы просто находим глобальный. Однако таким образом можно было обнаружить только одну позу одновременно #. _, conf, _, point = cv.minMaxLoc (heatMap) x = (frameWidth * point [0]) / out.shape [3] y = (frameHeight * point [1]) / out. shape [2] # Добавьте точку, если ее достоверность выше порогового значения. points.append ((int (x), int (y)) if conf> args.thr else None) |
Теперь мы можем просто отобразить эти ключевые точки на исходном изображении.
для пары в POSE_PAIRS: partFrom = пара [0] partTo = пара [1] assert (partFrom в BODY_PARTS) assert (partTo в BODY_PARTS) idFrom = BODY_PARTS [partFrom] idTo = BODY_PARTS [partTo] если указывает [idFrom] и указывает [idTo]: резюме.строка (кадр, точки [idFrom], точки [idTo], (255, 74, 0), 3) cv.ellipse (кадр, точки [idFrom], (4, 4), 0, 0, 360, (255, 255, 255), cv.FILLED) cv.ellipse (кадр, точки [idTo], (4, 4), 0, 0, 360, (255, 255, 255), cv.FILLED) cv.putText (кадр, str (idFrom), points [idFrom], cv.FONT_HERSHEY_SIMPLEX, 0,75, (255, 255, 255), 2, cv.LINE_AA) cv.putText (frame, str (idTo), points [idTo], cv.FONT_HERSHEY_SIMPLEX, 0,75, (255, 255, 255), 2, cv.LINE_AA)
для пары в POSE_PAIRS: partFrom = pair [0] partTo = pair [1] assert (partFrom в BODY_PARTS) assert (partTo в idBODY_PARTS) _PARTS = ]idTo = BODY_PARTS [partTo] если точки [idFrom] и точки [idTo]: cv.line (кадр, points [idFrom], points [idTo], (255, 74, 0), 3) cv.ellipse (frame, points [idFrom], (4, 4), 0, 0, 360, ( 255, 255, 255), cv.FILLED) cv.ellipse (кадр, points [idTo], (4, 4), 0, 0, 360, (255, 255, 255), cv.FILLED) cv.putText (frame, str (idFrom), points [idFrom], cv.FONT_HERSHEY_SIMPLEX, 0.75, (255, 255, 255), 2, cv.LINE_AA) cv.putText (frame, str (idTo), points [idTo], cv.FONT_HERSHEY_SIMPLEX, 0,75, (255, 255, 255), 2, cv.LINE_AA) |
Мы сохраняем этот файл как run_pose.py внутри нашей папки Pose_Estimation. Теперь мы можем запустить этот код с помощью этой команды, которая передает ему протокол, веса сети и входное изображение.
python3 run_pose.py —input sample.jpg —proto Pose / mpi / Pose_deploy_linevec_faster_4_stages.prototxt —model Позе / mpi / Pose_iter_160000.caffemodel —dataset MPI
python3 run_pose.py —input sample.jpg —proto pose / mpi / Pose_deploy_linevec_faster_4_stages.prototxt —model pose / mpi / Pose_iter_160000.caffemodel —dataset MPI |
Показывает ключевые точки на изображении. Вот несколько примеров:
Как видите, на среднем MacBook это занимает примерно 3 секунды. OpenPose можно запускать в реальном времени с использованием графических процессоров Nvidia, что я продемонстрирую в следующем посте.
Leave a Comment